Leeham News and Analysis
There's more to real news than a news release.
Bjorn’s Corner: Flight control, Part 2

By Bjorn Fehrm
18 March 2016, ©. Leeham Co: Last week we covered the early days of flight control when the pilot controlled the aircraft’s movable surfaces (called movables; e.g. stabilator, rudder, ailerons, spoilers…) without the involvement of computers.
We will now continue with more advanced control systems, all based on the electrical signalling of the intentions of the pilot to the movables. As the modern Fly-By-Wire (FBW) control systems modify the aircraft’s basic flying behaviour, we need to start with understanding what that behaviour is. Then we can understand how different FBW systems go about modifying these characteristics.
One could think that an aircraft is made to fly nice and stable, should the pilot take a few seconds and admire the view. Nothing could be further from reality. All normally stable aircraft which do not employ flight computers or autopilots to enhance the normal stability would go into a rather nasty dive after a while.
Why this is so and what is done to help the pilot in modern FBW systems is the subject of today’s and next week’s Corner.
Aircraft stability
Normally stable aircraft (all commercial and private aircraft are of the stable type, only military fighters use marginal stability to enhance performance) have three modes of movement which are part of the aircraft’s natural way of flying. These three modes (and some additional ones that we don’t go into here) are tuned to create a harmonic aircraft during flight testing of the aircraft.
One cannot suppress one of the movements, then the aircraft will be awkward to fly. What one does is tune them so that the aircraft is stable in the short term and will react in a predictable manner to an upset like a gust on a hot summer day longer term.
Phugoid
The first mode of oscillation is the most enjoyable one. Those that have flown a private airplane on a long trip without autopilot know what I am talking about. Flying straight and level, one trims the aircraft with pitch trim, rudder trim and if available with aileron trim to fly straight (otherwise one manhandles the rudder trim a bit to get the wings to fly level).
After careful trimming, the aircraft flies straight for a while but then starts to cycle up and down in a slow mode, the phugoid. If a tiny disturbance turns the nose down the slightest, the aircraft gains speed. As it gains speed, lift increases and after about a minute it starts climbing, Figure 1. When climbing, it loses speed, so gradually the nose goes down again after another minute. Then the cycle recommences with the aircraft gaining speed while dipping the nose.
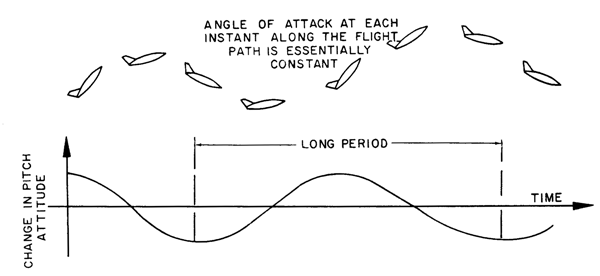
Figure 1. The slow oscillation in pitch called Phugoid. Source: Google images.
Famously, United Airlines Flight 232, the McDonnell Douglas DC-10 that crash landed in Sioux City (IA) in 1989, went through a series of phugoids as the pilots attempted to land without the ability to use the control surfaces and only using the engine thrust on the Nos. 1 and 3 engines to fly the airplane. They used the aircraft’s natural stability to pitch the nose down and up by changing the speed of the aircraft.
The fact that the nose goes down when the aircraft loses speed is a very important aspect of a stable aircraft. It means that most aircraft will get itself out of trouble (trouble here is losing so much speed that the airstream breaks down and we are in stall) if the pilot just lets go of the stick.
Spiral mode
In the description of the Phugoid, there is an important mode that would have made straight and level flight difficult to achieve with hands off the stick, the spiral mode. The spiral mode causes the aircraft to start leaning over on one wing after the tiniest of disturbances. The leaning gets steeper and for most aircraft the aircraft will take very long to roll wings back to level; many will not roll back.
The spiral mode is the mode that is keeping a pilot the busiest. Take your mind of keeping the wings level for a few seconds and next time you check you are hanging on a wing. The first pilot aid that one buy’s for the private aircraft is therefore a wings-leveler. I have flown small aircraft with only the leveler and it was a big help on long trips. The Phugoid is so much slower, one can control pitch on a trimmed aircraft by just nudging the stick/yoke from time to time.
When we built model hand gliders, we countered the spiral mode with a lot of dihedral. That is we bent the wingtips up so that any leaning followed by a sideslip meant the lower wing got more effective and stopped the roll.
For most aircraft, one limits the roll stability because too much of it triggers the ugliest of the modes we need to understand, the Dutch-Roll.
Dutch Roll
The Dutch Roll is the most uncomfortable mode of aircraft movement for a naturally stable aircraft. It gets strong for an aircraft which is stiff in roll (a lot of dihedral or wing sweep) and which has a weak spiral mode. The movement of the aircraft resembles the Dutch ice-skaters on their canals, therefore one came to call it Dutch Roll, Figure 2.
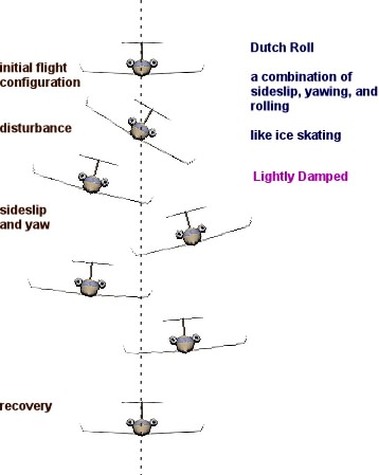
Figure 2. An aircraft that is plagued by Dutch Roll. Source: aeronotes.weebly.com.
The sideslip and dipping of the wings is not too bothersome. The wagging of the tail is the problem for commercial aircraft. Almost all commercial aircraft have a Dutch Roll tendency.
Typically the low wing jet aircraft of today have wings which are angled upwards to make clearance for the engines, increasing roll stiffness. To lower high speed drag, the wings are swept and this increases roll stiffness further.
The result is an aircraft which is wagging the tail. To counter the wagging, all commercial aircraft (mechanical controls or FBW) have a yaw damper servo working on the rudder. By stopping the tail from wagging, the sideslip does not start and the Dutch Roll is stopped. People who have flown in an aircraft with an unserviceable yaw damper know how uncomfortable work in the aft galley or sitting in the last seat rows can be. It is easy to get sea sick.
It is easy to see if your aircraft has a Dutch Roll; look out at the wingtips. If they move in a slow circular movement this is the Dutch Roll at work (modern FBW aircraft might dampen it to the extent that you can’t see it; for private aircraft it shall be detectable).
Next step
Next corner we will look at how modern flight controls are used to help the pilot to keep the aircraft stable. There are several philosophies how this can be done, with big arguments arising which one is the preferable one. But that is for next week.
Bjorn needs to go back to aerodyamics 101 because the 18 March article about flight controls is beyond laughable. Doesn’t matter to me, but some readers may take him seriously and there are enough misconceptions in the industry – we don’t need more.
Hi Jack,
tell me what the misconception is. This will be useful so I can tell the best brains in the UK on the matter. They flew with me on Cranfield Aeronautical University’s specially prepared Jetstream when we went through the different modes.
I guess you might be disturbed by me giving private aircraft as reference for most modes, don’t worry the modes were on the Airbus A350, the Mach 2 J35 Draken and the 15 other aircraft types I have piloted as well, just harder to detect as you need to fly them without active stability augmentation.
My very limited experience of the Internet suggests to me that this is a bored computer slave .They think this sort of thing is funny,hence no explanation of what’s wrong with the article. Very unlikely to be boss of PayPal.I could be wrong!
Like I said I don’t know much about the Internet,, I’ve just found out how to check out this user name. Ummm,still not a very helpful post is it.
Clown is the word we are looking for.
HiJack, you could be right of course, but some more clarification might be required to secure public credibility of the company linked under your user name. Bjorn is a very experienced pilot & this site has thousands of followers.
This Jack Selby checks to a Singapore aviation consultancy, not the PayPal Jack Selby.
Does the problems with a Dutch roll also occurre on aircraft with canard configuration?
I read somewhere a while ago that a canard configuration is more stable than the common tail stabilizer and controls.
As always, a pleasure to read.
I was in the team that created one of the canards in the market, the Gripen and my collegues from flight academy were Gripen test pilots. But I honestly don’t know if there is a difference. The problem with modern military and commercial aircraft are that they are flown in FBW augmented mode all the time (which we will talk about next) and that this masks all basic aircraft modes.
I have not flown a Rutan Varieze, a canard without augmentation where any difference would be detectable. I would think they are basically the same, low yaw stability and high roll stiffnes triggers dutch roll.
The increased stability your read about I think is the resistance to stall entry. A naturally stable canard like Varieze is set up to have the canard stall before the main wing, making it outright difficult to enter a stall for the main wing.
A military fighter canard is set up differently, it needs very low pitch stability to gain performance (you don’t want a lot of the aircraft weight on the low aspect ratio canard=high induced drag). The canard is then controlled to not stall as it is the primary movable for keeping an unstable pitch mode stable. Look at movies from the low speed parts of flight expositions and you see the canards working on Gripen, Rafale and Typhoon.
Hello Bjorn
Mirage III also commes with canard or moustache (non movable) and Tu-144.
Where they “augmented” ?
Strange first comment…
The Piaggio P180 has a sort of forward wing, they dont call it a canard however.
Hi Duke,
this is a different principle, a very interesting one, the so called tri surface design. The problem with a classical tail design is that you add tail downforce to gain stability (wing needs to carry aircraft weight + tail downforce), with a naturally stable canard that you need to load the canard hard (canard is then draggy even though wing gets offloaded a bit by the canard). The tri surface design tries to fix both problems in that the foreplane and the tail balance each other so the wing only have to carry the aircraft weight, a classical tail movable design that does away with the tail only drawback. Typical clever Italian idea, needs lateral thinking.
In the end you need to look at the induced drag of all surfaces so the gain might be small but interesting all the same. Airbus was exploring the idea for the A340/330, they played with a foreplane low slung just before the front door pair.
Hi Poncho,
no they were not. The Mirage and the Tu-144 canards had different purposes. A problem with a tail-less delta aircraft like the Mirage, Draken, Concord or Tu-144 is that they need to command up-elevon to lift the nose to the typical 10-12° alfa angle for landing (or low speed flight in general). This destroys the wing profile, you want a profile with more camber for low speed, now you get less camber. The Tu-144 and Mirage “moustaches” ie swing out canards served the purpose to give pitch up moment so the elevons could be canted down instead of up = more lift ie lower landing speed (high landing speed is a problem for deltas).
The Mirage III and Kfir fixed canards main purpose was vortex coupling so that the wings total lift at low speed was increased. Two different methods, a bit the same effect.
Even when you were tailess and not a delta like the Vought Cutlass, reports say if it got in a spin, just let go of the control column. And apparently considered very stable for the time in an ground attack mission. Seems like being a carrier fighter was just the wrong place for it.
The Wright Bros started out by putting the horizontal ‘tail infront’ but it soon made sense to have vertical and horizontal tail together- but not allways
The Cutlass had natural stability ie was nose heavy. Re spin I think it had more to do with the twin vertical tails, should be effective. BTW look at the take-off picture from a carrier for the Cutlass at Wikipedia, one can see the enlevons (outboard of the VTPs only) at very high up position, this destroys the wing’s camber and forces a very large wing (low Clmax).
“Typically the low wing jet aircraft of today have wings which are angled upwards to make clearance for the engines, increasing roll stiffness.”
Is this the opposite of high wing aircraft like the C-17, A-400 or my favorite the BAe-146? Also I remember vaguely about how they are more resistant to roll because of the pendulum effect with the fuselage being lower than the wings?
I do remember reading that the flight computers control on the F/A-18 are so advanced that the pilots are taught when they get into an unrecoverable spin or stall to take there hands off the controls and let the computers fly the plane out of it. Amazing stuff.
Thanks Bjorn, excellent stuff as usual!
Hi Geo,
you are right, high wing aircraft get a natural high dihedral effect from the center of gravity being lower than the wing. You therefore often see negative dihedral on these aircraft (C5, An-124, BAe-146) to reduce roll stiffness, to get the right roll response and avoid dutch roll.
Re computer augmented FBW; the system has so many parameters at its disposal that it can be programmed to have better exit strategies from trouble than most pilots. For unstable fighters a pilot cannot control the aircraft alone anyway.
Hi, Björn. Excuse my ignorance, but as i understand your post, on a modern airliner (aka Airbus A330), the stability is inherent to the design. Ergo, the AF bird that went down, would not had to be down? Could it have been better to just let the aircraft stabilize itself, and then try to reenter the flight path? May be even in a modified law, or direct law, the airplane would have been flyable again, perhaps flying the oppostie direction and several feet down, but flying?
Ramiro, I’m afraid so. I think the disturbing conclusion is that if the left (experienced) AF pilot had simply fainted and let go the stick, even for a few seconds, the aircraft would have stabilized, out of its fatal stall situation.
It let to interesting discussions, should anyone /anything be able to overrule a pilot destroying the aircraft.. (think Germanwings, shutting down the wrong engine, taking the wrong runway..)
I believe the F-16 has a system that will over-ride pilot inputs so to avoid controlled flight into terrain. To my knowledge, it is the, as of now, only system that will actively over-ride pilot inputs for safety enhancement purposes. Most new cars, by contrast, have automatic systems that will prevent the driver from running into a wall or similar obstacle, so it’s technology that exists and is becoming increasingly common.
Thats a recent addition to later model F-16 – Auto GCAS.
For new cars crash avoidance mostly an option with some going all the way to automatic breaking, the car technologies that are available are:
forward collision warning, autobrake, lane departure warning, lane departure prevention, adaptive headlights and blind spot detection.
Hi Ramiro,
as Keesje writes, had the pilots (they were two and after a while both were disoriented) taken the hands from the sticks when the stall warning went off the aircraft would have recovered itselves. I will cover more about the Airbus stall recovery in the subsequent corner, there is a lot to say around it.
How long should we wait for this typical analysis :d
Bonne journée
Add in that the Chief Pilot did get back up to the cockpit in plenty of time to stop the crash.
He too was confused or disoriented. That’s one I have a hard time with, I can understand the disoriantion (though the reaction that got them thee in the first place si beweidling, pulling full nose up at altidue is not a response for anyting you8 encounter)
The experts are not calling the intial problem “startle reaction” . I am not sure there is any difference between that and panick.
And don’t getg me wrong, I have been there and have a couple of T shirts. For me, the stunning part was 3 expierence pilots got into that mode (or fixated) and stayed there.
As this has been an issue in more than one accident, there is someithng inherenaly human prone to that.
The best one was a fellow student who got into a downdraft on a runway approach (there were warnigns in the NOTAMS but did not warn how sever it were )
He said the hardest thing he had even done to that poin in his life was push fowared on the yoke. But he did it like he had been trained.
Close to the ground I can understand a reaction like that, at 35,000 feet? Something has been missed and while not universal, it also is not rare.
Ideally you would identify those areas in the simulator and then train to ensure they were trained out. All of us probably have those holes, just a matter if you find them or not.
You would not want to waste time on that aspect if the person was not prone to it, you would want to find those areas the next person did not do well in and train on that.
It was noted why do they have pilots do take off and landings in Simulators. You do at least one of those each flight, short haul a lot. Its obvious if you can’t do that, work on the parts they never get exposed to.
Training is working in that direction now but its a work in progress.
I don’t know if anything could have saved the aircraft once it was in that deep flat stall but there were several fathers to that disaster that started with iced over pitot tubes, poor pilot decision making not helped by the some of the systems and displays in the cockpit. It has spawned reams of articles exploring the flight systems of the 330.
But yeah if the co-pilot had done nothing until the pilot got back disaster might have been avoided.
Here is the link to the translated version of the final French report on the accident. It’s fascinating reading…
https://www.bea.aero/docspa/2009/f-cp090601.en/pdf/f-cp090601.en.pdf
Geo: You will note that the Chief Pilot did not diagnose the situation either (or at least until far too late). Frankly its what you are trained to look for, rate of decent 10k per minute, no airspeed, nose way up, throttle at max, you are in a stall.
There was nothing about the stall that could not have been corrected with nose down. Some aircraft you can’t get out of a spin (F4 was a bugger) , I have no idea on modern commercial aircraft though I also have never heard of one getting into a spin.
A stall is simple, either you are or you aren’t stalled and nose down restores you to flight (given enough altitude) there is nothing non recoverable about it. Nose down any between by 4500k would have done it (I will defer to airline pilot on that, its a guess, light aircraft 500 feet would do it.
We don’t know how he would have reacted to the mess up in the first place either.
Its not just the A330, its all automated aircraft that have the issue. A330 got caught.
Boeing with their disappearing floor protection on the auto throttle is an example. The NTSB does not like that it flick off based on another system operation.
Airbus as I understand it does not, so if they had gotten that low and slow it would have kicked in as the computers saw the situation develop.
What is interesting in a tragic way is that Airbus approach does not seem any better than Boeing, both have close to the same accident rate.
Basically it means both have problems in different areas.
Or as good, as the situation has a known solution, i.e. as I recall, you put thrust to 85% and the nose up to 5 degrees (I may well be wrong on the numbers but the concept is the right initial response. )
At that point, the aircraft stabilizes in a safe speed as well as altitude maintenance.
Why not program that into the computers? So much else is.
I refer to it as the Almond Joy affected. Sometimes I feel like a nut, sometimes I don’t” (US candy commercial for the non US or younger generation)
Sad state of affairs. You get so used to the aircraft being safe, you don’t realize how unsafe it is. Regulatory authorities are working on it, but Av Week just did a report and the hands on flying part is still a joke with some Airlines and they are allowed to define what meets the need themselves.
Hours and hours of mind numbing boredom and suddenly you are supposed to remember your seldom done training (talk is cheap and its not the least effective, so just because someone mentions it does not make it training – you need to actually practice it and have it thrown at you in the simulator.
Having had the personal experience of getting an aircraft into a spin with no training on how to get it out, the initial reactions are not something you would want to show the public.
After that, either you figure it out or you are dead. Fortunately y for me and my family, I figured it out but it was a close run thing (attribute to the Duke of Wellington I believe)
I did pass that onto two brothers that also learned to fly. At the very least get a spin demonstrated, you at least know what it feels like and what the correct response is.
Thank you all.
Several small things can lead to a disaster, and the human mind must be trained every time again and again. Good judgment is difficult under stress.
Truer words have never been spoken, equaled maybe.
Current direction in training is now to thrown odd combinations at the pilots, not the same old rote session in and out. the idea is you have to learn how the aircraft and the systems work so the solutions are intuitive. AF will probably never repeat that, Air Asia X (or whoever they are) repeated it with a twist.
Bjorn,
There are lots of airplanes that do not have FBW but have rather sophisticated AFCS with stability augmentation systems, gust load alleviation/ride quality improvement on delta wing fighters with low wing loading, etc. FBW is not required for that. Don’t get confused with FBW and AFCS…..
Absolutely Andy,
the mechanical control Fig 2 from last week was the mechanical + electronic augmented pitch and roll channel from the F15, one of the heavily augmented mechanical systems. I worked shortly on the digital Autopilot for the SAAB Viggen (never flew the Viggen though) and that control system also represented the last ones before it was easier to achieve all the tricks one wanted to implement in the control system with electronics only, beatifully complicated it all was with movable interconnects, gearboxes and augmentation servos all over the place.
FBW can make integration easier, that’s all. But if too simplified, then we end up with undesirable characteristics like all Airbus airplanes with no feedback to the flight crew.
Keep in mind its extremely tricky and or difficult to get it all to work.
I don’t remember which one did it, but one of the Sweedish fly by wire aircraft crashed (first flight I believe)
As I recall they collaborated with someone in the US to work out the program.
I work with building controls that use a very low cost version of those controls (analog input into a digital results and then back). On our part it takes considerable fiddling with the parameters to get them tuned.
The consequence to our customers’ are annoyances, consequences to an aircraft are lethal.
I often think the people who get an aircraft to behave the way they want it to wind up in rubber rooms.
Could have been the J39, their first FBW design.
It crashed twice while the SAAB control guys got the settings right for the FBW. Lars who flew the missions I know from the Air Force (we have flown tactical missions together, he learned me a bit about how to dog fight an enemy). The root cause was a school book example of the real problems with unstable aircraft controlled through FBW and we will go through that as well.
Andy, that was my special interest when I actually flew an Airbus FBW for the first time in April 2015. I was one of four pilots who where allow to test fly the A350, you have the articles on this site. The feedback from a C* (next week we go through what that is) flight law controlled by a non feedback joystick is not the problem, the aircraft’s instantaneous feedback through your bum and spine makes the brain think you directly control the aircraft as if you were connected to the movables like for a 737. It was the same reaction as you have when flying a classical fighter (including my Draken) which has 100% servo boost. The stick mechanically connect to the servos control valve but that brings zero feedback (the stick does not move with the movable or signal any of the force working on the movable), you move the stick against a spring like for Airbus. Yet you feel like you are directly controlling the movables just as you do for the Airbus.
The thing which is more to discuss with the Airbus setup is why the two sticks were not mechanically interconnected so crew members can follow what the other guy does.
Bjorn, when I said feedback, I meant that the control stick and throttles move as commanded by auto systems. On Airbus FBW they don’t so the pilot has no idea of what the automatic systems are doing. And I would never rely on any feedback thru “your bum and spine” when flying in IMC.
Agree that the joysticks on Airbus FBW should be mechanically interconnected, and they should also be backdriven by the AFCS and the throttles should also be backdriven by the autothrottle.
Lastly, I would not compare single seat fighter flying with that of multicrew commercial transports. Totally different.
I would agree that the throttles should be backdriven as one has a hard time sensing longitudinal accelerations correctly. As for the stick yeah, but no big deal, have flown both models and no big difference. Re flying feel I was just saying that the feel of a non feedback stick in both environments were similar. Any stick feedback like in the new BAE active feedback sidestick controller for the J-35, Gulfstream 500/600 and KC-390 I would primarily see as giving situationnel awareness between pilots in a commercial cockpit or sidestick equipped trainer. But one could also implement stick shaking and soft stop stuff, things we will talk about next week.
Bjorn:
My visual picture of this is a John Wayne movie on a DC6 or some such flight form Hawaii that went bad (dead engines I think) and the co pilot panicked.
John Wayne I held the wheel with one hand and backhand the co-pilot with the other!
I was astonished when the Egyptair 767 went in and one of the first hard findings was that the horizontal tail planes were in a split configuration .
I asked our Flight simulator chief insurer, how is that possible.
If one guy is pulling back and one guy is holding forward, they split. Uh oh.
I found that astonishing as I thought there was something at least about last input taking precedence.
I now I rant about it at times, but I do think this has all been put together as singular bits and pieces of , hey, look what we can do and not designed as a system.
Certainly its not regulated (accepted like Boeing battery) and I think it should be (standardized) on best practice regardless of where those come form, A, B, E or United Aircraft etc.
@TransWorld: The John Wayne movie was The High and the Mighty, it was a DC-4 (in reality leased from TransOcean for the movie). John Wayne was the co-pilot, not the pilot, who was played by Robert Stack. Stack panicked.
Scott:
Thanks, its been a long time! I loved that movie.
Lot of relevance to the I was growing up in.
https://youtu.be/ZnrTq9Y-uJY
Looking back at old movies, even 70s 80s, special effects have become so much better , you simply can’t look at the old one seriously anymore. EK has enormous video library on board. Tried watching StarWars 3.. you can’t. It used to blow everybody away 30-40 years ago, me too.
Keesje: It just depends on what generation you are form.
We used to fill in with our own imaginations, we did not have to rely on complete fidelity to make it real.
I still like the old movies, Star Wars, Fate is the Hunter (though the book cover much more) as well as original Star Trek.
Andy:
While the extremes fighter go to are different, flying fundamental are still the same and in normal flight regimens they are not going to be much different other than the size of what you are flying
I drove big rock rigs with pure hydraulic ram steering. No feedback. You cranked the wheel which was watched to a hydraulic spool until you were roughly where you want to be, then back bumped it to stop. Bump it a tad to get more. No rack and pinion, it had to be a lot less good than FBW. It was acceptable for what it was intended to do.
Of course you are in Met conditions, your feedback are your flight instruments. You really need to read the sense of what Bjorn is saying not complete literal. He is one guy I would trust my life with in an aircraft.
If its clear, you get the feedback from how the aircraft is responding to the horizon. You don’t quit your instrument scan but you do use outside more than inside.
When I was going to flying school we had night sessions that were “of interest” not part of the curriculum, I attended all of them as they were great.
The one that stands out was a film of the Air Force re-doing the spin series on the F4 Phantom as they were killing too many pilots in spins.
Worth looking it up as it is one of the all time odd wing and tail configurations of all time. I don’t think anyone did it before or sense (though it was a very good aircraft from all reports)
However, like the loss of Pitots, there was a very specific and as I recall totally non standard configuration you put the controls into to recover (not the simple step on opposite rudder)
I don’t remotely remember it, I think there was a series of steps to get it stable then the final one to stop the spin.
The wildest one was where they took it to 110 degrees (slightly laying on its back and kicked it into the spin.
I have never seen an aircraft do gyrations in 3 dimensions, it did.
It was tumbling fore and ate, going round and round as well as rotation around its axis.
Stunning, they lost 20,000 feet before recovery (they started them at 30k!_
Instructions were the final move (if you had altitude) was to pull your tail chute, if that failed, bail out, you were not going to recover.
If at low altitude, don’t bother, punch out immediately , you did not have even close to the altitude needed to recover
A lot of the scenes they filmed ended in a chute deployment, most of the time once they had the details down they recovered with controls, but even the best ones ran into a sitauti9n(s) where nothing worked.
I don’t see what rock rigs and rack& pinion have to do with airplanes, but so what. When you fly with autopilot and autothrottles engaged, backdriven controls inform the pilots directly what these automatic systems are doing so they would not have to second guess from airplane responses. The benefit from backdriven controls and throttles is immediately obvious when using autoland in gusty conditions when the airplane responds to all kinds of inputs such as turbulence, gusts and autopilot/autothrottle activity. By seeing how hard the autopilot and autothrottles work gives a good idea of the severity of weather conditions which would not be as obvious otherwise.
Off topic, I know, but how long can a B737 circle for while waiting to land in strong winds? 2 hours seems a long time to me.
How long is a piece of string- they can circle till the fuel runs out or most commonly divert to a nearby airport long before that happens
Just thinking about why they would even carry that much fuel for that sort of flight, but it was from Dubai so maybe a lot cheaper there.
AV herald says that they had enough fuel for about 8.5 hours flying. Can that be right?
Sure does not sound right. I know they can fly coast to coast, 6 hours more or less, don’t know if that is max load or not.
Of course getting good fuel in Russia is ??????
So if they can, with that low a load it might be to their benefit.
Fuel costs are pretty low right now there may be some kind of balance of cost vs risk involved.
Ben Rich’s book on his time at Lockheed is a very good read, especially the section on how the F117 got developed. If ever there was an aircraft with aerodynamics that needed to be tamed by a flight control system, that was it. The most impressive part of the whole thing though was that they got two flying prototypes going pretty quickly and spent a mere $30million doing it (cheap even in the 1970’s). By all accounts the F117 ended up being nice to fly, a remarkable achievement given that non of the surfaces looked appropriate for stable flight!
Makes you wonder why equivalents these days cost so much. Oversight doesn’t come cheap I reckon.
I’ve often wondered whether it’s time to reassess how flight control systems are implemented. The fashion these days is a bank of embedded computers running software controlling the servos, etc. This is ferociously expensive to develop and maintain – you can’t just go swap processor boards etc.
For example, the F22 uses (used?) Intel i960 processors for the flight control system. I read ages ago that Lockheed had to make a lifetime purchase of i960s from Intel even before the F22 went into service. Intel were stopping making them, and the cost of porting the software to another platform was always going to be prohibitive.
Mostly a flight control system is solving differential equations. AFAIK that’s all flight dynamics boils down to. The difficulty comes in proving that the software does this properly (the actual writing isn’t so bad). The proof comes from hugely expensive testing, and this has to be repeated every time there’s a change in the software.
However, there is an old fashion style of computer that is very well suited to implementing differential equations: analogue computers.
They went out of fashion pretty early on. All the do is solve differential equations, they were prone to drift, they were pretty dull in comparison to a digital something with a VT100 terminal , etc.
Yet from the point of view of flight control there’s a lot to be said for them; it’s very easy to show on the bench that an analogue computer design matches the specified differential equations.
I think that these days a lot of their problems are easily solved. Modern components are much better than what was available in the 1950s/1960s. You could even have a digitally managed analogue computer, one where the values or resistance, capacitance and inductance are controlled digitally, but the actual computation (the solving of the differential equations) is still being done by amplifiers acting as integrators, differentiators, etc.
I read sometime ago that part of Concorde’s systems was an analogue computer. The engineers who looked after it said they could keep it going forever, because it was so easy to replaced broken parts. So long as a replacement component had the right or better specification it could be soldered onto the board, and the board was fit to fly. There was no regulatory need to get an exact replacement. Analogue electronics doesn’t need that restriction. An opamp is, well, pretty much like any other opamp. A 10kohm 1% resistor is just like any other (and probably a whole lot more stable than the originals Concorde had).
Anyway, my hypothesis is that a modern FCS implemented with analogue electronics would be a whole lot cheaper to implement than a digital one, largely because a lot of the testing / review burden is removed from the program.
Any thoughts Bjorn? Crazy or wise?!
What you are missing is the tuning.
My stuff is pretty simple, I have a single oscillation dimension (temperature or pressure that is a simple above or below setpoint) to deal with. I have systems we can’t do that with.
An example is an air unit that takes in 100% outside air, trying to heat air up via fluid heating coil that receives anything from -20 to 80+ (F) cannot be done with a single set of tuning parameters.
Keep in mind you can do anything instantly digitally, but what you are trying to control has hysteresis and or inertia , a heating coil has its own dynamics (inertia). The valve can to to 100% instantly , but the hearing coil takes along time to heat itself up and then start hearting air up. Then it has all that residual heat that when you close it off it does not response initially (direct gas fired burner unit are good as they respond very quickly)
they call the tuning parameters PID (Proportional, Integral and Derivative ) . Mostly I use PI and my field does not require the D.
So imagine all this in multiple dimensions of 0 to 45,000 feet, air speeds of 0 to Mach 2, air densities of 14 psi to almost nothing and aircraft loading all inside a changing dynamic of fuel burn and load, Its pretty insane.
there are ways to deal with it, self tuning is the best, most of them at my level are lame. They just tune the control until it stops doing anything.
Pre loaded different parameters into the P, PI and or PID (and I suspect most aircraft stuff is PID).
No idea how the approach it, they have made it work but you can see why development costs are so high, all those lines of code and if there is a hole anywhere in there that is not accounted for bad things happen. One affects others and each has to be tested by itself, with the others and then real world
It makes my head hurt (which is why I do what I do and people like Bjorn make that stuff function)
The computer chip life cycle is definitely not in sync with military fighter development. I worked on the original Gripen development in the 1980s, they now make the third upgraded version, the E/F. What they do then is separating everything which is flight critical including FBW into an own virtual environment and the tactical part into another. This means both can be modified and tested at their own pace and rules. Flight critical much slower and more rigorous of course, tactical software shall now be adjustable in the fights pace and each operator’s needs.
The other critical thing to get chip independence is hardware abstraction, standardized OS and high level language for the FBW and autoflight functions. Modern systems use the same AFDX ethernet networks as the civil airliners do and use commercial real time OS environments like VxWorks or ARINC 653 OSes like Integrity. That is your way away from chip dependence and non abstracted low level code.
I’m familiar with the current crop of real time OSes, hypervisors, specialised networks, etc. They’re all pretty good, I’ve used most of them with excellent results. Greenhill’s Integrity is excellent, and I especially like the fact that the whole company is still owned by a single person who’s deeply passionate about correct software.
But none of that really helps reduce development cost. Code still has to be written, reviewed, unit tested, integrated, system tested, flight tested, bug fixed, etc. etc. no matter what it’s written in or what it’s running on.
Being smarter with what it’s written in and what it’s running on helps with mid life updates and component obsolescence, but not with the initial development. What you’re describing for Grippen E/F sounds like a fairly major overhaul that is only marginally cheaper than porting the original software to the latest hardware. However it will certainly pay dividends if they ever want to make future upgrades.
The industry average for software in a project like a flight control system was about 1 line of code per programmer per day. That’s veeeery slow! Surely someone out there would value a different way of doing these things.
And that gets back to my original point, that an analogue computer design is very easy to prove analytically, with a pencil and paper, provided that the equations one has to solve are linear*. Analytical proofs are very cheap: 1 engineer + paper + pencil -> proof, proceed to build. You can’t do that with a digital system.
* Are the equations of flight still a set of linear differential equations, or are things a lot more complicated than they used to be?!
Hi Matthew,
most of the equations are linear but not all. In the case of the Gripen FBW problems special digital filters were made to filter our certain pilot inputs when the aircraft’s available control authority was to marginal to let the inner loops doing the stability augmentation and the pilots commands share the available control authority with the normal ratios. This kind of selective filtering is only practical in a digital solution, analog it gets unwieldy. There are also several areas of the aircraft’s aero where its not linear like the whole stall/departed flight regime or when shockwaves wander over the aircraft. Doing the logic for the transfer function for all these cases would be hard with analog logic. You also come into realizing your whole protection logic, whether soft stop or hard stop. There are multitude of cases that crop up within the flight envelope that all need their special logic.