Leeham News and Analysis
There's more to real news than a news release.



Bjorn’s Corner: Aircraft drag reduction, Part 6

By Bjorn Fehrm
November 24, 2017, ©. Leeham Co: In the last Corner, we described how the Wright Brothers obtained the aerodynamic data they needed to design gliders and aircraft.
But there was additional knowledge they needed: how to control an aircraft and how to drive it forward.
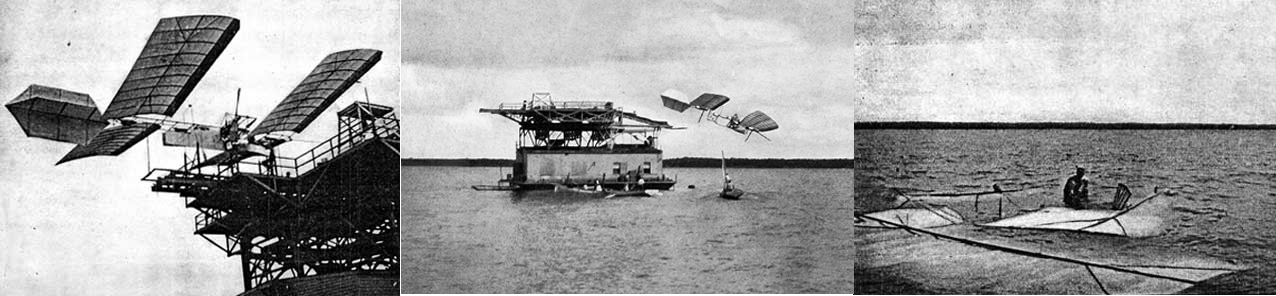
Figure 1. The Langley manned Aerodrome crashes into the Potomac River 7th of October 1903. Source: Wikipedia.
The Control of an aircraft
Just as aerodynamic lift and drag of wings were badly understood before the Wright Brothers, how to control an aircraft to stable flight was not well understood as well.
Through experiments with hand gliders and full-scale gliders, pioneers like George Caley (1804), Lilienthal (1895) and Langley (1896) had learned:
- To achieve pitch stability, the centre of gravity should be ahead of the wings centre of pressure. If the aircraft had two wings like the Langley Aerodromes in Figure 1, the centre of gravity should be ahead of the joint centre of pressure.
- To get the glider stable in roll, you needed to put the wings high or add dihedral to the wing(s).
- Most gliders had horizontal and vertical tail surfaces to get stability (Chanute’s glider of 1896, Figure 2 and Langley’s aerodromes, Figure 1). But none could move them effectively to control the aircraft.
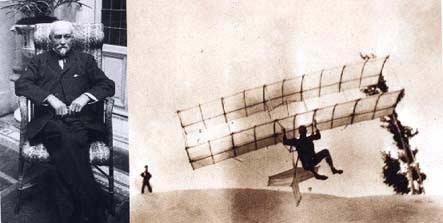
Figure 2. Octave Chanute and his 1896 glider. Source: Wikipedia.
The means to get stability was understood, but how to control the aircraft back to stable flight after a disturbance was in its infancy. Lilienthal, Figure 3 (and Chanute’s pilot, Figure 2), controlled pitch and roll by changing their body’s position and thereby the glider’s centre of gravity.

Figure 3. A Lilienthal glider with Lilienthal (as museum puppet) controlling it with his body. Source; Wikipedia.
It wasn’t very effective, as Lilienthal and others didn’t use a harness where the pilot hung under the glider and had a push bar to change the angle of attack or roll of the wing, like today’s hang gliders, do. The pilot hung in the middle of the glider and tilted his body forward-backwards or sideways to change the gliders attitude with the changed body’s weight position.
The inefficiency of this change of centre of gravity caught Lilienthal when he stalled on his last flight. Once the glider turned nose down after the stall, his body hung far forward and he could not tilt it back in time to avoid a crash nose-on from 15m.
Langley managed to get a scale model of his Aerodrome No. 5 (a smaller version of the Figure 1 Aerodrome) catapulted from his launch ship on the Potomac River in 1896 to fly for 90 seconds over the water. The Aerodromes were controlled in pitch and yaw by tail surfaces called a Pe´naud tail that could be angeled up-down and sideways. No roll control was available.
The subsequent full-scale Aerodrome crashed directly into the water with his pilot on board. The control surfaces weren’t powerful enough to let the pilot control the Aerodromes. After two crashes, Langley stopped his project to get a manned flying machine to perform a controlled sustained flight.
Wrights’ achieve control
Not only did the Wrights find out how to design their gliders and aircraft for good lift versus drag, they also invented how to control them. Their first 1.5m wide kite glider of 1899 had wing warping to control roll. They got the idea by studying how birds changed direction.
Subsequently, Wrights introduced a canard surface on long outriggers to control pitch, and finally a vertical tail surface to control yaw, Figure 4.
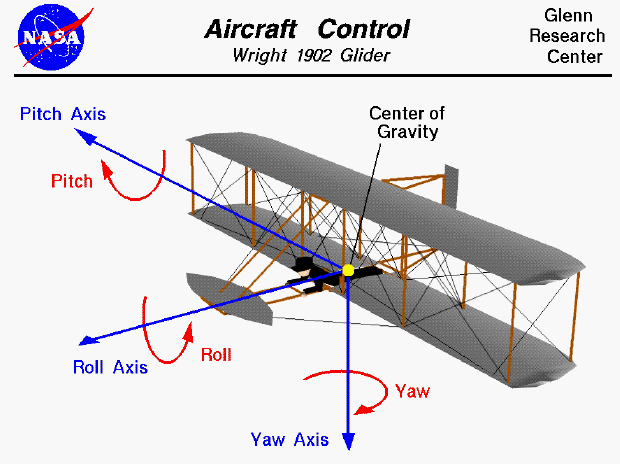
Figure 4. The gradual development of three-axis control during 1901 and 1902 glider trails. Source: NASA.
The reason for a canard pitch control was the Lilienthal crash. The Wrights saw that a canard surface would be more effective in controlling pitch (it is, but it also makes the flyer unstable) and its outriggers would protect the pilot in case of a forward crash like Lilienthal’s.
The movable rudder was a 1902 addition after the wing warping caused adverse yaw (the glider yawed out of the roll induced turn), which needed countering. Adverse yaw is produced when the outer wing in a roll turn creates higher drag (it is warped to increased angle of attack) than the inner wing (which is warped to lower angle of attack). Adverse yaw also affects aileron controlled wings, that’s when a pilot use the rudder to keep a clean flight path.
With the 1902 glider having pitch control (controlled via a lever by the left hand), roll control (controlled by a hip displacement cage) and yaw control (through an interconnect with the roll hip cage), the Wright flyers had designed the first aircraft which had positive three axis controls.
Last nut to crack, propulsion
By winter 1902, the Wrights had controlled their 1902 glider successfully and had gathered design data in their wind tunnel how to get a higher Lift/Drag ratio flyer designed. By now, the last nut to crack for powered flight was positive propulsion. There were no lightweight aircraft engines available nor any effective propellers.
We will discuss how the Wright’s cracked this last nut in the next Corner.
Wasnt the principles of ‘3 axis flight’ first established by Englishman George Cayley as early as 1804?
“The model glider successfully flown by Cayley in 1804 had the layout of a modern aircraft, with a kite-shaped wing towards the front and an adjustable tailplane at the back consisting of horizontal stabilisers and a vertical fin.”
‘ To measure the drag on objects at different speeds and angles of attack, he later built a “whirling-arm apparatus”, a development of earlier work in ballistics and air resistance. ‘
https://en.wikipedia.org/wiki/George_Cayley
He published a paper ‘On Aerial Navigation’ in 1810. Of course, a form of propulsion wasnt available around that time.
Cayley had a Penant tail on his glider which could control pitch and yaw like Langley’s Aerodromes. But what I understand it was fixed, mounted on a thick wire which was bent to given pitch and yaw inputs before the glide. Wrights’ had interactive control of the 3 axes by the pilot.
Very interesting. The wing warping was an ingenious idea.
It caused no end of difficulty as the Wrights patent attorney was able to file an extensive patent in 1906 to cover many aspects of control of flight not limited to wing warping, even though prior art had invented ailerons, flaps etc. The ‘plane’ had existed before but a system of control was their invention.
The legal battles consumed the Wrights until WW1 when the US government legislated to overturn the patent- although giving the surviving Wright brother Orville a small royalty
Home steading of (foreign) inventions in the US is not new. Same for the automobile.
And then there’s the legend of John Goodman Houshold who allegedly took flight in a glider between 1871 and 1875.
Apparently he had a seat below the wing suspended on 4 ropes. His research is said to involve shooting vultures and other birds, weighing and measuring them to calculate the wingspan required for his flights.
It has been said that he had the Bishop of Colenso check his calculations.
Unfortunately there isn’t a great deal of evidence of Houshold’s work.