Leeham News and Analysis
There's more to real news than a news release.



Bjorn’s Corner: Aircraft stability, Part 9

By Bjorn Fehrm
June 8, 2018, ©. Leeham News: In the last Corner we discussed how a pilot uses the advanced Automatic Flight Control System (AFCS) on modern high-end business jets and airliners.
Now we will discuss what separates the high-end (and expensive) systems from the less capable we described before. It’s about flying difficult routes which contain demanding takeoffs and approaches.
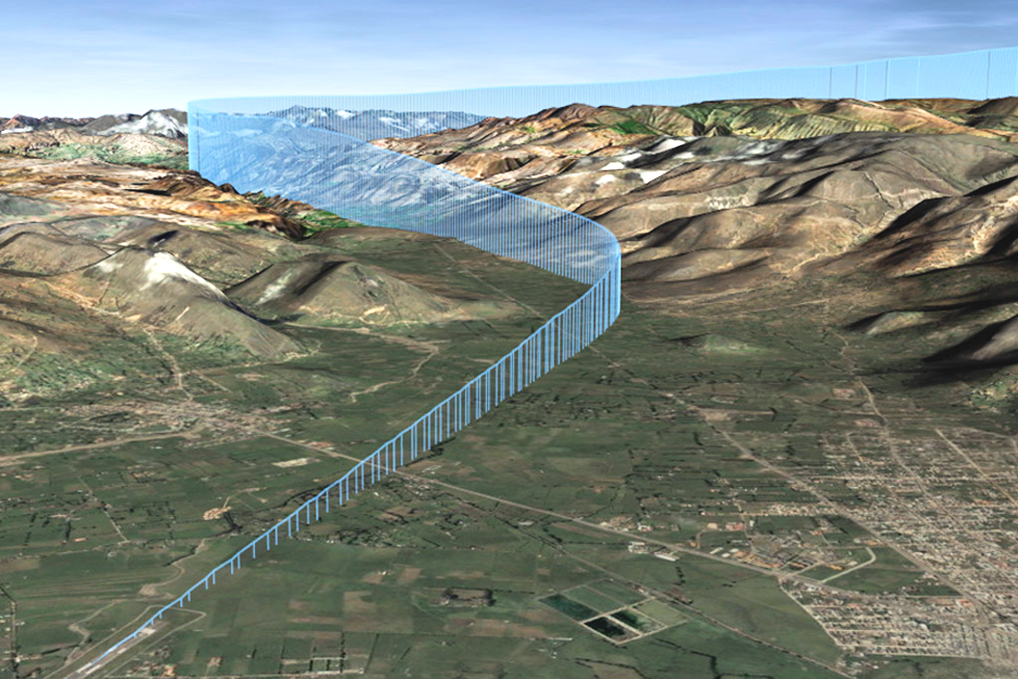
Figure 1. A challenging approach where RNP based navigation is needed. Source: Wikipedia.
Flying difficult missions
If we look at the higher end Automatic Flight Control Systems (or Autopilots) and compare to the middle level we described, there aren’t large differences in the basic functions. There are all the lateral and vertical modes and the standard approach methods; ILS, RNAV, LPV (ILS like GPS approach) and of course VOR or VOR/DME.
Where the differences appear is when the going gets tough. Either in weather with needed minima below the standard 200ft above the runway for the ILS and LPV approach types or when the surrounding train is too dangerous for normal approaches. The routes can also pass so far North that normal navigation aids no longer function well.
Lower minima than 200ft.
To fly to lower minima than 200ft above the runway, the airport needs an ILS CAT II or III installation or a GBAS (Ground Based Augmentation System) corrected GPS based approach called GLS (GBAS Landing System).
The aircraft must now have dual redundant FMS, Nav receivers and autopilot systems for the landing. Not only is the precision and redundancy of the improved systems needed, the system must also have means to monitor its performance and to alert the pilots if anything is not to the normal performance level (Nav signals or aircraft systems). And this alerting must happen in seconds (see video below).
The two autopilots land the aircraft itself for CAT III landings, also rolling out the aircraft at the middle of the runway. The pilot then takes over for the taxi.
The alternative to the expensive ILS installation at airports is GPS based systems. This minimizes the needed infrastructure at the airport. For an LPV approach to 200ft for a typical runway (without a difficult terrain situation) only Space-based systems are needed. The approach is done with a GPS based LPV approach where the GPS signal is refined with a Satellite Based Augmentation System like the American WAAS (Wide Area Augmentation System).
WAAS measures the GPS fault in 3D at different locations in North America and adds a correction to the aircraft’s GPS signal. The Avionics must be able to recieve this Sattelite based correction to qualify for performing LPV approaches.
To reach minima below 200ft, the augmentation systems must be measuring the GPS signal’s deterioration at the airport of landing and send the aircraft the corrections needed via a communication radio link. We now go from a Space Based Augmentation Systems (SBAS, covering a continent) to a Ground Based Augmentation System, GBAS, covering an airport. The latter allows a higher precision but at the cost of an installation at the airport.
My CAT III landing two years ago with the A350-900 was done as a GLS (GBAS Landing System). There was no difference to flying a CAT III ILS, the frequency for the approach was different, but everything else was identical. Press two APP(roach) buttons and look for the annunciation from the system and you are doing a GLS. After touchdown, reverse and autobraking I took control for the taxing to the stand.
Difficult terrain
The RNP enroute flying and approaches have been developed for routes and airports with difficult navigation situations. Enroute RNP navigation is used over the oceans and RNP approaches for airports with challenging terrain situations. The navigation is done with high precision and the requirements for the needed precison is not focused on a particular Navigation system (like VOR, GPS or ILS) but rather what Required Navigation Precision is needed for safe flight.
It’s then for the FMS to use the aircraft’s navigation systems to achieve the RNP class required. For Oceanic flying the RNP is either 10nm or 4nm. For approaches it starts at RNP 1 (1nm) for the initial approach, then 0.3 and finally for tough approaches (RNP AR, see below) 0.1 for the final approach.
RNP route segments and approaches require special certification of the avionics to the RNP class required. There is a more demanding type, called RNP AR (Authorisation Required) which goes to 0.1nm precision. Now the Flight Crew must be certified to fly the approach. We are dealing with landings at demanding airports and it requires extra training and monitoring to guarantee safe flight.
After you have watched this Youtube clip, with a Qantas 737-800 flying the RNP AR approach to Queenstown Airport in New Zealand, you will appreciate why you want all this precision and the annunciation in seconds if something’s not right.
Difficult locations
We have described how a MEMS-based gyro platform functions fine for the AHARS (Attitude Heading and Reference System) for normal flights. When flying in areas where a complementary magnetic sensor or GPS doesn’t function well to correct the drift of the AHARS (the GPS signal has compromised coverage like over the Poles), a high-performance ring laser Inertial Reference System (IRS) replaces the AHARS. This drives up the cost and complexity of an Automatic Flight Control System.
We have now covered the autopilots of different aircraft classes. Next up is what is happening with the Air Traffic Control system by 2020 and why the avionics has to be changed for a lot of aircraft.
0.1Nm = 202.5 Yards
Question 1 – If this is the best of the best that’s available (RNP AR), how does it safely deliver the aircraft onto the runway without the aid of the pilot? I’d have thought 0.01 Nm (20.2 yards) would be too much error.
Question 2 – The satnav in my car seems much better. It tells me that I’m going under a bridge or over a river at pretty much exactly the time that I am. It seems to be very accurate – better than 0.01NM – and yet it works with MEMS devices, not expensive laser ring gyros.
Now I’m sure I’m misunderstanding something, just not sure what?
The RNP if a presently a standard for approach navigation where for instance an ILS can’t work because you need a curved final procedure or the ILS signal would be too disturbed by the surroundings. This does not mean the requirement for accuracy is higher than for an ILS procedure, just the procedure contains necessary manoeuvres an ILS procedure can’t contain (it’s by definition a straight approach). RNP 0.1 means the total system must guarantee the aircraft is within a radius of 0.1nm. The Actual Navigation Performance (ANP) is also shown to the pilots and is much higher. It’s just when ALL factors work against the accuracy of the navigation, the aircraft can come close to the limit. The clearance to surrounding terrain is appropriately dimensioned in the approach.
How is 0.1NM precision anywhere near sufficient for a blind landing? 0.1NM = 220 yards or so.
Why does a satnav appear to perform so much better than that? It tells you when you are going over a river or under a bridge pretty much exactly when you are, certainly not with 200 yards of error.
I liked the Quantas clip. You might check Zeeland.
Hi Bjorn,
Excellent summary of a very complex topic. The video you linked to is a Jetstar Airbus A320 flying the approach into Queenstown. Qantas (Jetconnect actually, who operate Qantas services into Queenstown) 737s are only RNP 0.3, which means that there are a few days a year when they can’t get in, but RNP 0.1 aircraft can.