Leeham News and Analysis
There's more to real news than a news release.



Bjorn’s Corner: Sustainable Air Transport. Part 28. Vectored thrust VTOLs.

By Bjorn Fehrm
July 15, 2022, ©. Leeham News: We started the analysis of the market’s most prominent VTOLs with multicopters last week. Now we continue with vectored thrust VTOLs.
The most known exponent for vectored thrust VTOLs is Joby Aviation’s Joby S4 VTOL, Figure 1.

Figure 1. Joby S4. Source: Joby Aviation.
Vectored thrust VTOLs
A vectored thrust VTOL uses a tiltable rotor to work both in vertical and horizontal flight. The idea is old and has been in operation for 15 years by the Bell Boeing V-22 Osprey tilt-rotor.
The concept has advantages and disadvantages.
It’s an advantage that the same motors and rotors can be used for both vertical hover and horizontal wingborn flight. By tilting the lift rotors forward after the vertical takeoff, they can generate forward thrust, thus enabling a wingborn flight. When transitioning to wingborn flight, the thrust needed is reduced by the Lift/Drag ratio of the vehicle. It makes possible higher forward speeds than a multicopter at a lower power setting, thus saving on battery energy.
Another advantage is that during the transition from vertical to wingborn flight, the rotors wash the lifting surfaces with their slipstream, thus cleaning away tired boundary layers and creating an attached stream earlier than the wing alone can achieve. This helps with the tricky transition from vertical to wingborn forward flight.
A disadvantage is the large difference in thrust need between vertical and wingborn flight. We have learned the thrust during vertical flight must equal or exceed the weight of the VTOL. For the Joby S4, we have a hover thrust need of 22kN/5,000lbf, whereas forward flight requires 1,5kN to 2kN/350lbf to 450lbf, depending on flight altitude and speed. The top speed of the S4 is 200mph/170kts, with an optimal cruise speed of around 150mph/130kts.
The thrust needed for wingborn forward flight is then up to 15 times lower. It’s a positive for energy consumption but poses several design challenges. A difference between top thrust and cruise thrust of 15 times leads to a difficult compromise for the motor/rotor combination.
All rotors must be variable pitch; fixed pitch rotors are not possible with thrust vector designs. But the too large rotor area for forward high-speed flight means you have a very high mass flow and very low overspeed. While this gives high theoretical efficiency, the practice adds blade drag that reduces the efficiency gains, and your thrust lapse with speed is high.
You can either lower the total disc area to gain forward flight performance at the cost of an inefficient hover, or you have a large total rotor area and accept that forward flight propulsion is compromised. The electric motors can only work efficiently inside a restricted torque/RPM range, and you must decide if this is the hover or cruise range?
Another problem with the large rotors of Joby, Archer, and other vectored trust VTOLs is extra airframe drag from the swirling rotorwash that hits all parts of the VTOL. Figure 2 shows a CFD simulation of the propwash of a C-130 Hercules.
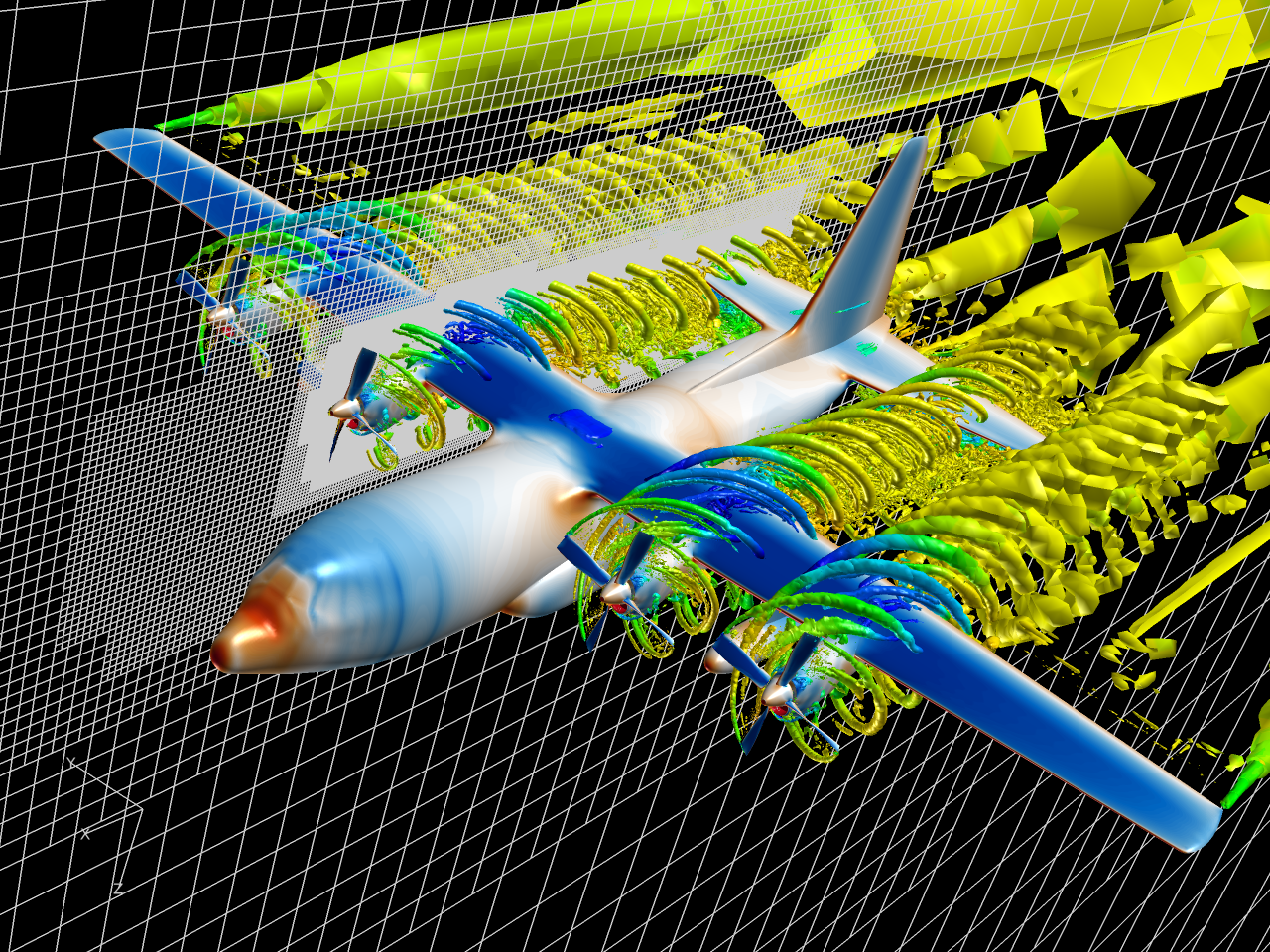
Figure 2. CFD simulation of C-130 propwash. Source: Aerocat08 in Reddit Aviation.
The simulation clearly shows the corkscrew motion of the slipstream from the propellers and how this impinges on the nacelles, the wings, and for the inner engines, the horizontal tailplane.
It creates an extra drag called scrubbing drag, and it also changes the lift distribution of the wing from the ideal elliptical distribution to a more rollercoaster value created by the propeller streams.
The result is that a well-designed wing and tail get their carefully tailored lift distribution destroyed by propeller/rotor streams. VTOL wings thus have lower L/D than their designers believe in their basic lift/drag analysis.
In the case of Joby S4 and several others, the large rotors needed for the takeoff and landing engulf a major portion of the airframe with its slipstream, creating the above drag and lift inefficiencies, Figure 3.
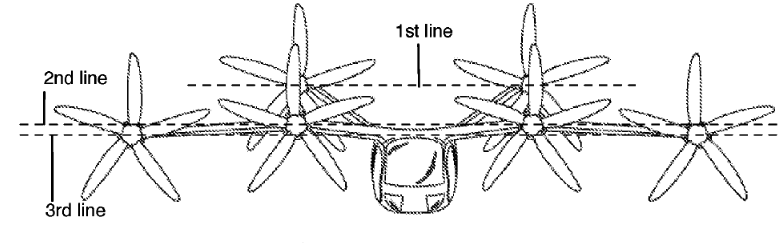 Figure 3. The alignment of the rotors for the Joby S4. Source: Joby Aviation.
Figure 3. The alignment of the rotors for the Joby S4. Source: Joby Aviation.
The forward inner rotors also inject their propwash into the rear rotors. The long blades and the pulsating load on the rear rotors make blade flutter a critical problem for a vectored thrust design.
The challenges involved in vectored thrust have led many VTOL teams to separate the two thrust forms into a dedicated vertical system and an independent system for forward flight. We will examine such a system next week.
Very nice, thanks!
I imagine that the 15-fold difference in thrust needed between wingborn forward flight and vertical flight will cause quite a challenge in propeller blade optimization.
I recall reading somewhere that the ideal (in some sense) propeller tip speed is approximately Mach 0.8. It seems to me that varying blade pitch and blade speed so to obtain a 15-fold difference in thrust will tend to move you quite a bit off of that optimum during large portions of a typical flight.
A regular 767 has 60k thrust at T-O but only 7k at cruise. Altitude and density matters as engine rpm is max at top of climb in thinner air. UAM’s with large rotors can benefit from higher flight levels but there is a limit. The Lilium Jet avoids the prop wash over the fuselage. With counter rotating and variable pitch props some of the disadvantage of big props can be solved. You can get an extremely short take-off roll and landing speed with very low wing loading (AN-2) so is VTOL always needed if you start from a helipad at altitude and have 100-200ft runway and can drop 50′ from its edge to gain speed and climb out like an albatross with 4 pax?
An updated overview on the various projects.
https://www.halldale.com/ext/resources/2022/05/17/eVTOL-.jpg?1652776432
All disruptive.
I assume that ‘motor.out’ scenarios have to be considered.
If one of the wingtip motors (or props) fails the remaining motor units not only have to still provide thrust equal to weight for landing, but they also have to be modulated to maintain lateral and pitch balance. That requirement might drive motor/prop design even further from optimum for cruise flight.
If it can be shown that such a failure is sufficiently unlikely to occur in takeoff, maybe making the emergency landing on a runway might be help. But that would require a heavier landing gear, not just skids.
-The issue of redundancy will be a major one, I hope Bjorn helps my brain through the thought process.😀
-A quadcopter does not have redundancy unless the propellers are contrarotating with independent drives which really makes it an octocopter.
The Swedish Jetson is of this design and if you have US$92,000 you can buy one. It can handle a single motor out but has a ballistics recovery parachute. https://jetsonaero.com/ Probably certified as a microlight (private property or unpopulated areas only)
-The minimum for redundancy is a hexacopter but best is the octocopter or more. They are apparently valued in the professional drone photography world due to their greater stability and the redundancy protecting professional camera equipment.
-Nevertheless ways have been found to recover a quadcopter.
https://www.firstquadcopter.com/news/can-fly-one-dead-motor/
It spins but lands level hopefully without damage. For passenger aircraft quadcopters are not realistically certifiable.
-The Airbus Citybus is a hexacopter however it has two additional propulsion propellers which can apply a yaw and thus liberate the 6 lift rotors from yaw control by torque and I think it should be able to handle 2 rotor failures.
The certification requirements will have redundancy requirements, and the Joby S4 must manage with the most critical motor/rotor not driving. The design has two inverters driving each motor, and I logically assume different battery packs, so there is redundancy behind the motors.
But you must assume that a pitch control mechanism, a motor, or its cooling system goes down, effectively shutting down one of six rotors, and the vehicle must still be controllable and able to land vertically. If you are forced to include a forward flight landing within XX seconds, then you will restrict the flying paths severely and restrict the design to pre-recced corridors where there are strips at the appropriate distances.