Leeham News and Analysis
There's more to real news than a news release.



Bjorn’s Corner: Sustainable Air Transport. Part 32. Mixed architectures, Part 2.
August 12, 2022, ©. Leeham News: Last week, we looked at two eVTOLs that don’t fit the terminology we use; Multicopters, Vectored thrust, or Lift and Cruise, the Vertical VX4, and the Archer Maker. We look at Airbus’ CityAirbus NG this week, a Lift and Cruise design like no other (Figure 1).

Figure 1. The Airbus CityAirbus NG. Source: Airbus.
A market far from given
Airbus is the World’s largest airliner and helicopter manufacturer. It had an early start in the eVTOL space with two projects, the Vahanna (Figure 2), a thrust vectoring concept, and CityAirbus (Figure 3), a large multicopter design.
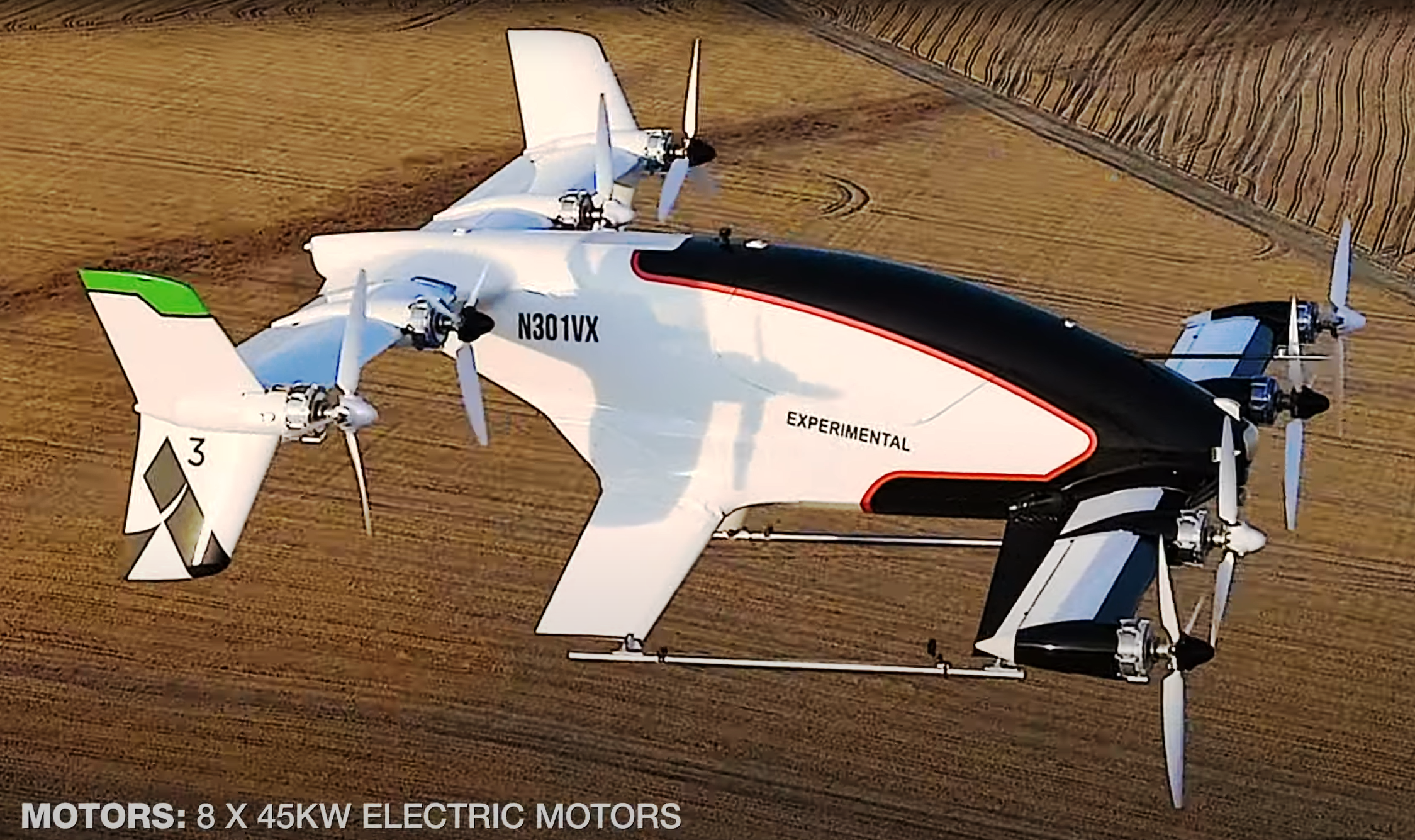
Figure 2. Airbus Vahana VTOL during tests in California. Source: Airbus.

Figure 3. The CityAirbus during tests in Donauworth, Germany. Source: Airbus.
I chatted with the design team of the CityAirbus NG a year ago in Toulouse and talked with Sarihan Balkiz, Airbus Head of UAM Strategy Execution & Partnerships, last week.
Here is my takeaway from these discussions, the strategy part first and then the technology:
- Airbus is in the eVTOL space with a long-term view. It has declared at briefings that any forecasts of a large VTOL market are high-risk. Airbus is no wiser than anyone else regarding whether there is a sizeable market. VTOL noise will be critical for the acceptability of the category. To help acceptance, Airbus focuses on medical transport and mobility to remote areas as initial services.
- The first generation of CityAirbus NG is deliberately conservative in its design, claims what it can do, and its market prospects. The NG project doesn’t have to pitch to an investment community for its budget, where it must promise great performance, a large market, and a bright immediate future for its VTOL.
- The team around CityAirbus NG had access to all the data from the Vahanna and CityAirbus prototypes. It learned a lot. From Vahanna about vectored thrust, from CityAirbus, the hover problems with a large VTOL. A lot of research post these prototypes were done on rotor noise and stability. The large VTOL rotors are prone to instability, such as flutter, when their load changes.
- The decision was to make the first generation CityAirbus NG as simple as possible to ease Certification and create operational reliability. The rather different architecture shall be understood in this context.
The CityAirbus NG Architecture
As can be seen from Figures 1 to 3, the NG architecture is very different from both Vahana and CityAirbus. In fact, it’s different from all other VTOLs I have studied.
In its base setup, it’s a multicopter with eight identical propulsion units. But the two rear rotors sit at about a 35 degrees angle from the horizontal and work as lift units during hover and combined lift and forward thrust units during cruise flight.
The six wing propulsion units sit on booms where the rear units eat into the wing trailing edge, Figure 4.

Figure 4. CityAirbus NG from above. Source: Airbus.
In a normal case, this would impact the function of the wing ahead of the cut-outs. But as all rotors rotate during forward flight, these rotors generate a low pressure that will suck the rear boundary layer off the wing into the rotor stream. Therefore, we expect that the wing has attached flow throughout the span at the low cruise speed of 65kts/120km/h.
The wing is large but cannot carry the aircraft’s weight due to the low cruise speed. It seems it can contribute about half of the lift at cruise with the lift rotors to generate the rest.
The control concept of the VTOL is simple as it’s 100% through RPM changes of the eight rotors by the VTOL’s Fly-By-Wire system. There are no movable thrusters or control surfaces.
For hover, all rotors work together, and the VTOL is tilted slightly backward to compensate for the forward thrust of the rear rotors. The transition is easy, tilt the VTOL to horizontal or slightly forwards, and the rear rotors go from 35° to 45° tilt, where they contribute to forward speed with 70% of their thrust.
If the control system and buildup of the propulsion are minimalistic, the NG structure is not. The wing area is larger than all other VTOLs we looked at except the VX4, and the twin-boom tail presents a doubled wetted area.
Advantages and Disadvantages of the architecture
Here is a summary of the advantages of the concept:
- The NG has the simplicity of a multicopter, yet it’s a lift and cruise design with more speed and range than a multicopter.
- The concept has a trouble-free transition, as the only change is the tilt of the VTOL in the forward direction. Rotors don’t start or stop, nor do their loads change significantly during flight.
- A simple RPM control of the rotors gives the flight control authority needed for a wing and tail design.
- The rotors stay within a reasonable RPM and speed range during the flight; therefore, these can be of the simple fixed pitch type.
- The wing contributes about half the lift in forward flight, lowering the energy consumption of the VTOL.
But there are also disadvantages;
- The cruise speed of 65kts is low compared with competing designs’ 120kts, and the range is also low at 43nm versus the typical 85nm. Part of this is the design; part is conservative marketing where these values contain margins. The figures also reflect a refreshing realism of what batteries can do by the introduction to service 2026 (batteries are from Airbus internal battery competence center).
- The CityAirbus NG has a larger airframe than competing four passenger thrust vector designs and about the same as faster, longer ranged lift and cruise designs. A large structure generates more drag due to size (parasitic drag) and weight (induced drag). The low cruise speed masks the parasitic drag, but a mass disadvantage will show up in higher hover energy and induced drag, eating into the VTOL range.
Conclusion
The Airbus CityAirbus NG project is a rare breed. Not only for choosing an architecture different from all others but also because of the non-inflated projections about the potential market and for the speeds and feeds conservatism around what the NG can do.
As we will see in a later Corner, few VTOL projects can realize their speed and range claims. The CityAirbus NG might be one of the few that can.
Any autonomous flight software packages intended for the CityAirbus NG? One would assume Airbus would work hard on automation with no pilot on board similar to Boeing Wisk. Getting a whole system designed and certified integrated to ATC, the vehicle and secure communication to Airbus servers for vehicle trend monitoring and emergency procedures in a big task. Its system has similarities to UCAV fighters/attack aircrafts and one pilot/pilotless aircrafts/helicopter systems. The thermoplastic bubble with batteries, avionics, secure communication and electrical engines is the easy part compared to design the whole system handling 1000’s of certified pilotless UAM’s flying in cities around the world.
I agree. The first challenge is to make these vehicles fly reliably and safely, then to build an air traffic system that can handle them.
Part of the safe flight and orderly air traffic is Pilot training. You will have requirements to start with an experienced helicopter or fixed-winged pilot with commercial air transport licenses. Those don’t come cheap nor in droves (ref the regional pilot problem in the US). The lofty production plans of the investment pitching OEMs are Pies in the Skies, not in the least for these reasons.
Re an autonomous Airbus VTOL, I’ve heard nothing about it.
Assuming FBW and networked data and cmd:
Autonomous or Remote control is a separate module with few further hard interlinks into the vehicle design.
Globbing that together is mostly Bullshit Bingo PR language.
Claes:
In some ways autonomous in the air is easier than on the ground (less stuff). Some of that is being done with the US Military.
But the proving and reliability end is enormous for civilian operations with people not just cargo.
I can’t imagine ATC end and cost for anything other than Platinum level missions and then alternatives……..
Closest I saw was a military exercise in AK, FedEx got the part to Anchorage and an F/A-18 was waiting to get it up to Fairbanks.
No one had any idea what it was but it was central to ops going or hold up and worth the cost for all the aircraft being held up.
That is extraordinarily rare not to mention an easy paid for way to handle it.
We had a number of critial medical materials come through that required temps to be maintained and they had containers for exactly that with battery backup. We plugged them in to ensure batteries would only be used if there was a complete power loss (we had full facility x 3 Generators backup).
It did not require an aircraft hold up or coordination. They could stay in the facility over night and catch the next days flight.
People jumping 30 or 50 miles? The cost is beyond prohibitive. An Uber would be a billionth less expensive.
I can see ATC saying, you are out of your minds we aren’t even going to consider it. Certifying an F1 to drive on US roads would be more feasible.
@TW, we will se how far and how fast UAM’s with pilots will operate and the system design for pilotless UAM’s in defined areas. I would not be surprised if the USAF/US Army will be the first to set up and build such system for unmanned UAM’s and work with the FAA and the US UAM manufacturers to install it/test it and fund a series of upgrades. I would start with the Gobal Hawk system to automate and handle a large number of UAM’s in a proving ground (like Edwards). The EU should do the same for the Paris Olympic and test over the North Sea and the Vidsel proving ground in Northern Sweden where the UCAV Neuron was tested.
-Its obvious why Airbus would take a conservative low risk approach that compromises necessary performance for some markets. The Airbus Brand is worth too much to risk with safety or even program timeline.
-It looks to me the aircraft can handle failure of any two rotors and in most cases up to 4. The failure of the actuators for the rear tilt should not be significant.
-In terms of the economics of such aircraft. Helicopters are a failure in many areas due to their expense to purchase, operate and maintain. This is due to their highly stressed single point of failure gearbox and rotors systems. They are also complicated to learn to fly and land requiring too much skill.
-EVTOL should be able to occupy markets in which helicopters are just too expensive where they restricted range is not needed. For instance Citybus will be perfect for transporting patients between hospitals to reach special medical facilities or to transport a specialist. Human Organs organs or other time critical medications. They may be able to operate as rescue vehicles that can land at the scene of an accident.
-The lowish range of 85km is much less the 100 miles/ 160km that the uber elevate white paper analyzed would attract lucrative super commuters. By way of personal example: Every month my wife and I travel 90km from the inner part of Sydney to the North Coast. It’s a road trip of 90km that takes 1.5 hours. It could be twice as long during a busy long weekend. The journey is 55km by direct line of flight. So the Citbus VTOL could complete the Journey in 30 minutes. Assuming a city has a vertiport every 10km on a grid one could imagine a 5km ride share on each end plus embark/disembarkation times. So it would be more like 55-60 minute. However if the vertiports are about 5-10 minutes walking distance it will be extremely beneficial or if there is a designated private vertiport This will be the case frequently.