Leeham News and Analysis
There's more to real news than a news release.
Bjorn’s Corner: Flight control

By Bjorn Fehrm
11 March 2016, ©. Leeham Co: We covered a bit on flight testing some Corners ago and the fact that test pilots like to fly in direct Fly-By-Wire mode for initial evaluation of the aircraft. There’s a lot to say about how an aircraft is controlled. I have experienced the significant shift from mechanical flight controls to Fly-By-Wire (FBW).
For the pilot, things haven’t changed that much for normal flying with the introduction of FBW, but for the aircraft manufacturer it’s a dramatic change. It changes the way how one works to get an aircraft to fly nicely within its whole speed and altitude register (called the aircrafts flight envelope).
We will cover the reasons for the changeover to FBW for commercial aircraft and what this enables in a couple of Corners. We will start with how the classical mechanical flight control gradually got itself into more and more complication and how this was solved with FBW.
In a subsequent Corner, we will look at how FBW enable us to fly the aircraft differently. We can with the help of FBW implement more sophisticated flight control laws, aimed at helping the pilot to a safer flight.
Classical flight controls
Figure 1 shows flight control systems as they started out. Wires connected the pilot’s hand and feet movements with the different control surfaces (movables) the aircraft had. This was sufficient for aircraft, which had a restricted speed and altitude range. This is still how private aircraft like the Cessna’s or Diamond’s are controlled, with direct wire or push-rod link between pilot and movable surfaces.
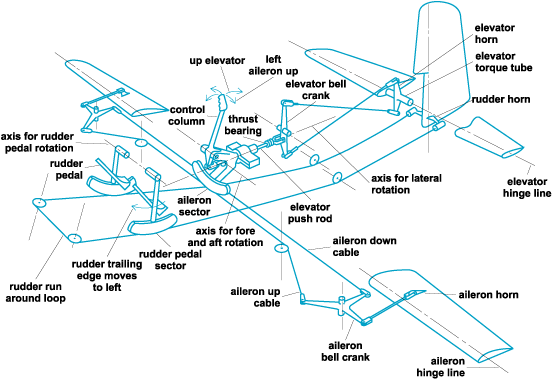
Figure 1. The classical control of the aircrafts control surfaces with wires and pulleys. Source: Google images.
As aircraft got faster and could fly higher, the classical controls were not adequate anymore. Initially the pilot’s muscle forces needed reinforcement with hydraulic boosters, but as speed increased, the gearing between the pilot’s movements of the hands and the elevator needed to be reduced at high speed. The large deflections that were necessary at low speed for take-off and landing were dangerous at speeds of 300-450 knots. Different mechanical gearboxes were introduced in the control path to reduce the ratio of deflection of the movable at high speed.
If the aircraft had any deficiencies in its flight characteristics, like a pitch up at certain flight situations or dangerous stall characteristics, stick pushers or other control modifiers were introduced. Then there was a need to attach the autopilots servos into the different control loops.
For systems with 100% hydraulic boost of the controls, artificial control feel had to be provided somehow, either with springs or servos. The result was that things got complicated as can be seen from Figure 2.
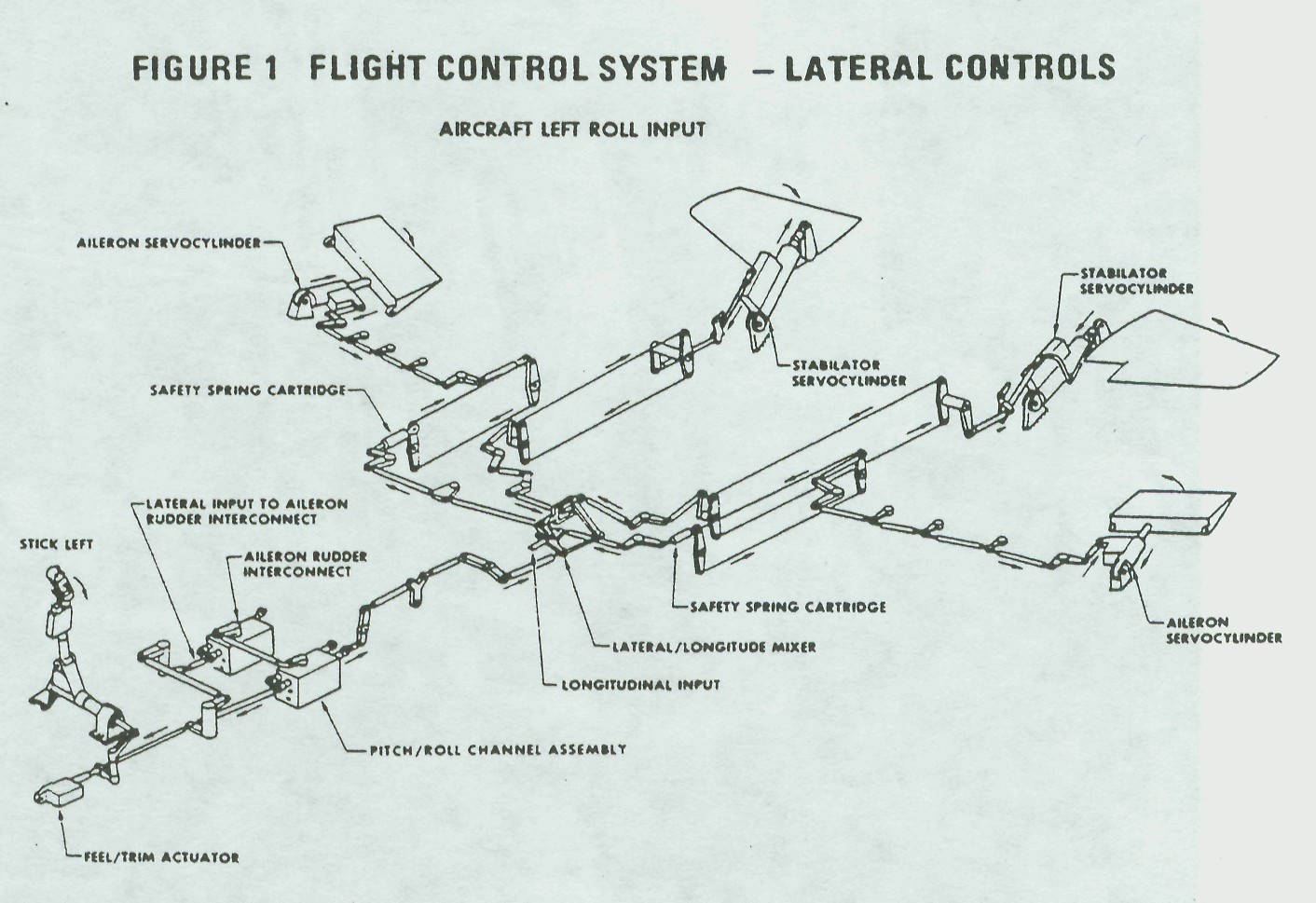
Figure 2. A late model mechanical flight control systems with a multitude of movement modifiers. Source: Google images.
Control response requirements
As military and commercial aviation matured after the Second World War, there was more and more understanding on how an aircraft should react and feel to the pilot. The result was certification standards that gave detailed prescriptions on what force should be demanded by the pilot for certain manoeuvres (not to high, not to low) and what aircraft behavior based on control input was acceptable.
To achieve these more and more stringent requirements at every corner of a wide flight envelop was demanding. Often one had to introduce mechanical complication to cover the requirements of a remote corner of the flight envelope, somewhere where one would not normally operate.
Fly By Wire
It all got very complicated for the military aircraft and commercial airliners that should comply with all the requirements. Military aircraft started the trend to FBW controls, with Lockheed Martin F-16 being the first operational aircraft with FBW.
The first commercial aircraft that adopted FBW was the Concorde, in 1969. Its flight envelope put high demands on the flight control system and the French/British designers solved it with electrical signalling of the pilot’s commands to the servos for the movables, Figure 3.
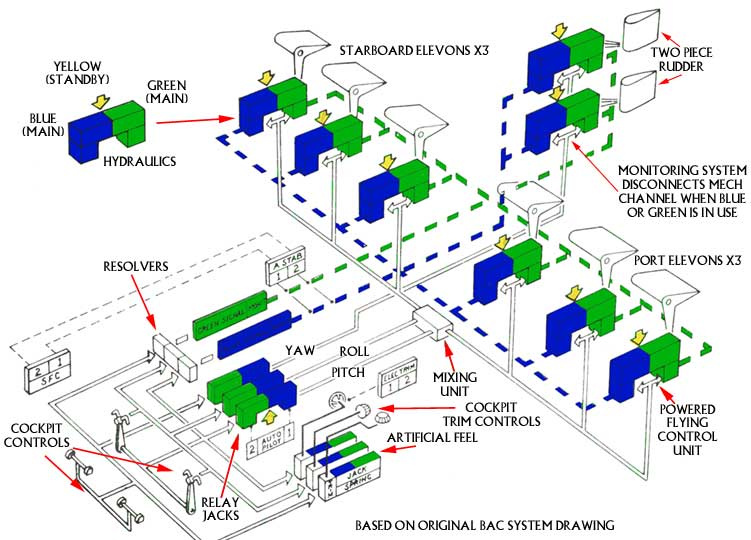
Figure 3. The first commercial aircraft FBW used by Concorde. Source: Concordesst.com.
While Concord used electrical signalling to control the deflection of the movables of the aircraft, it did not introduce analog or digital computers to modify the signal to a larger extent. The electrical signalling was introduced to ease the mixing of the pilots inputs, the inputs of an artificial feel systems (for the pilots yoke/pedal feel), a flight characteristics augmentation system (a damping system) and finally the autopilot.
Intelligence in the form of analog of digital computers that could modify the control signals based on a multitude of flight parameters were introduced in the late 1980s with the Airbus A320. With these in the control loop, more sophisticated control functions could be introduced, something we will cover in the next corner.
Another area where the Avro Arrow was ahead of it’s time.
Bjorn I hope you compare and contrast the different philosophies of Airbus and Boeing when it comes to implementing their FBW systems. I do enjoy your columns!
Also on the 320 how much weight was saved by going full FBW?
Thanks again.
Hi Geo,
the Canadian Avro Arrow was a fascinating project, ahead in most respects including the employment of FBW. So sad it was cancelled.
I will go into the FBW flight law philosophies of Airbus and Boeing.
I am looking forward to it.
I always thought it was a shame that they did not take the best of both worlds instead of NIH.
Also some thoughts that it should not be up to the mfg but should be mandated the way structural is. Take it out of the hands of the mfgs.
Boeing the disappearing auto throttle being one that NTSB said should be changed which I agree with. NTSB is not always right, some of their ideas are economically not feasible but that one sure hit the nail on the head.
Considering that Avro Canadas previous military jet the stock standard CF100 Canuck look 7 years of development to get into service, the Arrow was a white elephant in the making.
The development of ( analogue) FBW aircraft started with the F9F panther at Langley in 1954, and of course the purists say you need some signal processing before it becomes ‘true’ FBW. The first full digital FBW (without alternative controls) military aircraft was the test F8 Crusader which flew in 1972. The F-16 being an analog system.
Im not sure on this, but the FW-190 in WW2 might have had some sort of electrical signals to operate servos for flight controls
tupolev ANT-20 in the 1930ties ( electrical signaling replaces hydraulic lines and steel wires.
Avro Vulcan 1952 ( full analog Fly-by-Wire-System )
IMU the German VTOL research designs had some electricals too.
There actually is a world beyond the US 🙂
http://www.flybywireair.com/blog/fly-by-wire/
Another example of advanced flight controls, the Russian Energiya-Buran ( their Shuttle system)
On November 15, 1988, the second Energiya launched Buran (OK-1K1) into orbit. NO CREW WAS ON BOARD: the mission was flown by the orbiter’s computers. After maneuvering to a higher orbit, two orbits were completed, and then the maneuvering system was used to de-orbit. An autonomous re-entry was flown, with a perfect landing on the runway at Baikonur Cosmodrome.
ricochet.com/saturday-night-science-energiya-buran
This was 1988!
Fascinating as always, how soon before we have pilotless planes or at least the reduction of the crew to one pilot and a virtual controller playing video games from the ground. This is not too far away.
Perhaps we have ground pilots at either end to monitor the complexity of take off and landing and a single ferry pilot to keep an eye on the aircraft in flight.
This is the ultimate direction that all this automation is going, the proliferation of drone technology shows just what is possible.
I think remote digital control to a standard for passenger carrying is some time off yet.
And its more likely to be used for the routine long range flight part instead of a backup crew. ie While the primary crew rests. This is more likely rather than the remote takeoff and landing that you suggest.
We are told their is a shortage of pilots espesially in the commuter force A reduction in pilots and the advan c e of automation is inevitable. Or do you want to go Greybound?
Theres a shortage for those companies that pay their pilots peanuts, they move on up the career ladder as well and commuter planes are the starter job.
Apparently Korea is losing its jet pilots to China who have better hours and pay too.
Now I have learned something I would never have guessed! The first commercial FBW aircraft was the Concord way back in 1969. Makes the Concord an even more brilliant design.
It was all the more impressive considering it was a supersonic delta design and all that entailed.
Here’s a somewhat optimistic take on the “Concorde 2” that might be (probably not) in the works…
http://www.telegraph.co.uk/finance/newsbysector/industry/engineering/11782446/Concorde-Mark-2-Airbus-files-plans-for-new-supersonic-jet.html
The advanced model of the existing Concorde that they were developing back in the early 70s did away with after burning totally- as it was only needed for takeoff and to push through sound barrier.
Thats the really big regret, the improved version of the original model had greater range and less noise on takeoff. But of course other jets were being improved all the time and then fuel became a big part of costs and changed everything
Yes it was. An amazing aircraft. Maybe the most amazing of all time. Certainly very high on any list.
and damn good looking to boot!
I saw the Cooncorde once in flight at Fairford. Slow flyover pass the runway – incredible beautiful.
Now I see the Concorde and the Tu-144 about twice a week;-)
@MH
A sad sight however beautiful, any aircraft in a museum rather than flying is a trapped specimen. I am guessing you are on a German Autobahn, I have passed them myself, Sinsheim (?), without the debacle of the Concorde, Airbus would never have been such a success in my opinion, it showed to the key participants the need to ditch national pride and work together. Having said that it took another 35 years to create a truly commercial entity.
And aero tweaks?
EG the vortex generators on the wings of the 767, as alternative to a triplex pitch control system whose essence I forget.
Operators accepted the slight fuel penalty for simplicity.
(It was an interesting development exercise, Boeing contracted GE to develop it in case needed, then paid them money when not.
Purpose was to meet new regulations.)