Leeham News and Analysis
There's more to real news than a news release.
Flying the Irkut MC-21 simulator
By Bjorn Fehrm
21July 2016, ©. Leeham Co:Russia’s United Aircraft Irkut division had the good taste to bring a fully functional MC-21 simulator to Farnborough Air Show. I managed to get an hour of take-offs and landings during the show’s early hours on Thursday.
The simulator consists of a fixed cockpit, Figure 1, with a panoramic screen giving a terrain view out of the cockpit windows. The terrain model was of good quality and the feeling of flying a good non-moving simulator was there.

Figure 1. United Aircraft’s MC-21 exhibition simulator. Source: LNC
The simulator was especially conceived for exhibitions but it didn’t seem to be less functional because of that. Flight laws should be the same as the full MC-21 simulators but the implementation team is separate from the team which is making the flight crew training simulators. I was accompanied in the Sim by Sergey, one of the software programmers of the simulator. He was interested in my impressions, as it was still relatively early days in the simulator’s design.
First impressions
The first impression when sitting down is how roomy the cockpit of the MC-21 is. The fuselage is 0.11m wider than an A320 and the nose tapers to the full fuselage width unusually fast. The effect is a roomy cockpit with plenty of space besides the chairs and around the active sidesticks, Figure 2.

Figure 2. The MC-21 has a wide cross section giving a roomy cockpit. Source: LNC.
The MC-21 is the first civil airliner to use active sidesticks. I had tested active sidesticks on the Embraer KC-390 simulator and they have also found their way to Gulfstream’s new G500 and G600 Business jets.
Active sidesticks have many advantages. One can implement co-pilot motion feedback; force- increase for soft limit implementations; stick shaker functions, etc. The MC-21 exhibition simulator uses them as passive sidesticks right now. Despite no feedback, they had a good feeling. The MC-21 uses the Airbus type flight laws (C* type), meaning the aircraft flies as if it always is in autopilot Control Wheel Steering mode.
The aircraft keeps the attitude that one directs it to and remains there regardless of speed or gusts. This is fine with me; it simplifies flying, as one can rely on finding the aircraft where one left it. One only has to be aware that speed has to be controlled by the pilot or one has to engage auto-throttle in speed hold mode. I hand-flew the aircraft during the session; we never had the time to look at any autopilot modes.
We did look at the Russian made Flight Management System (FMS). It is of the modern full screen type with input via the roller ball input unit. Figure 3 shows he main menu, which is comprehensive. We also went into several of the sub-menus, most were populated and the needed functionality was there.
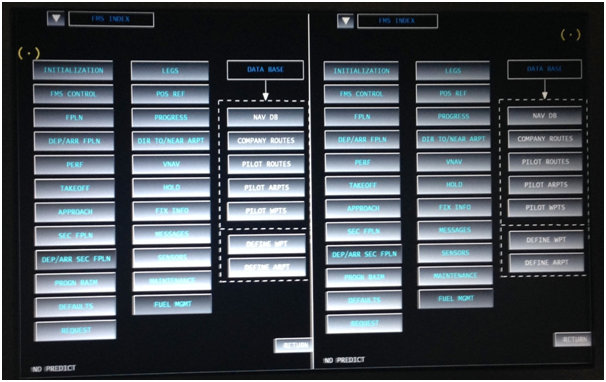
Figure 3. The Russian made FMS has a comprehensive main menu. Source: LNC
Figure 4 shows the FMS performance page. The picture is not 100% sharp but one can read out the essential parts. Going through the menu tree there were few uncomplete pages.
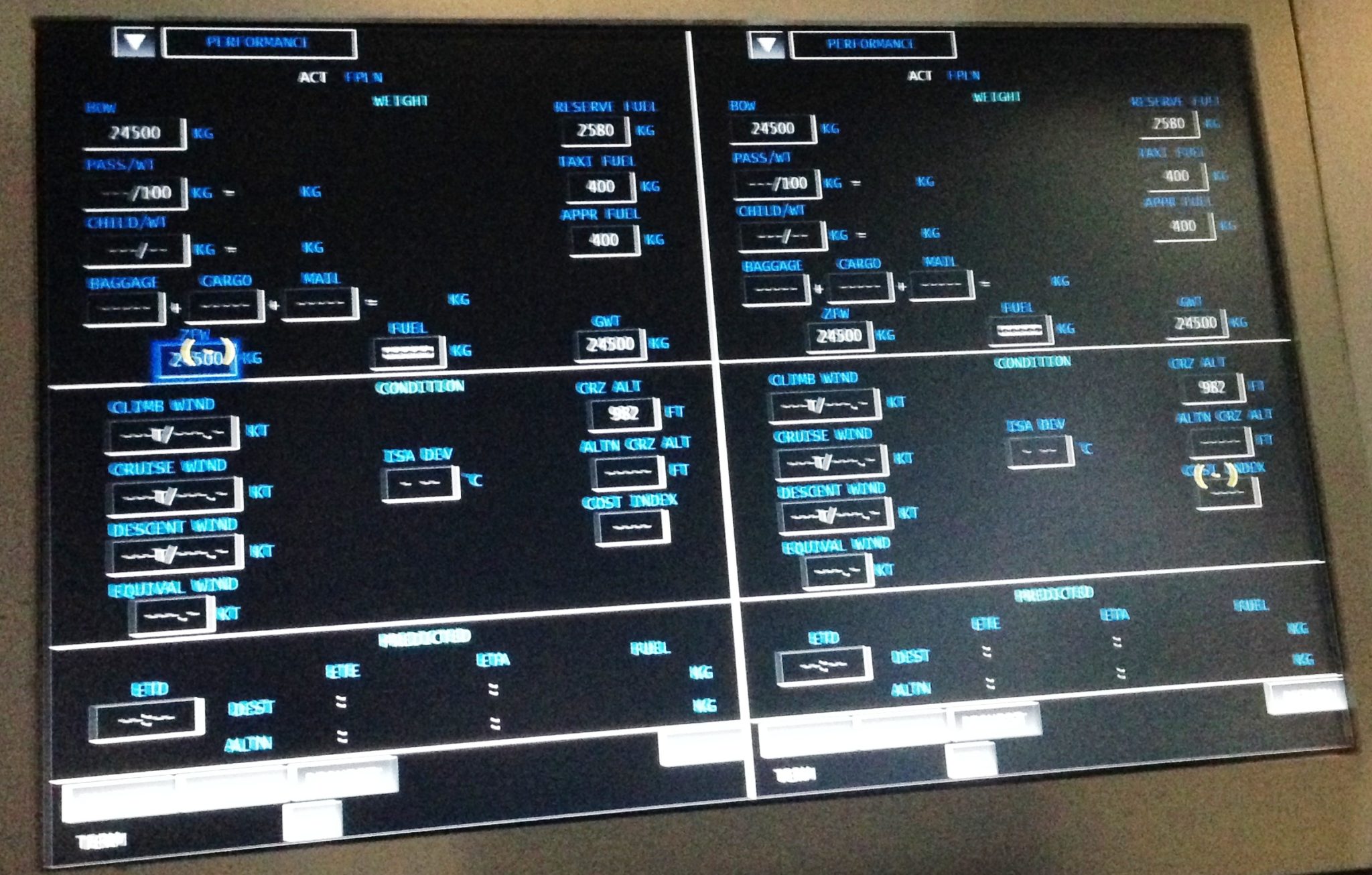
Figure 4. The Performance page of the FMS. Source: LNC
Cockpit layout
The cockpit layout was classical with flaps/slat, radios, throttles, engine controls and FMS/Screen controls in the usual places, figure 5.

Figure 5. MC-21 layout of the central console and displays area is classical. Source: LNC
Displays were the usual Pilot’s Flying Display (PFD) ahead with Navigation display and engine readings beside. At the bottom of the Nav screen, the aircraft’s movables with their trim status is displayed. All displays were easy to read. The co-pilot has a systems page displayed next to the navigation display.
Flying the MC-21
We did enough take-offs and landings so I could get a feel for the MC-21. It flew nicely. It was very steady in normal manoeuvres and easy to align for a go around after an ILS approach, for example, Figure 6.

Figure 6. Climbing after takeoff with the MC-21. Source: LNC.
A couple of times we made too-tight circuits and I had to hustle the aircraft down on a rather short and curved final. This was fine until we came on short final with our approach speed of 140kt. The aircraft was then very sensitive on the stick, too sensitive in my mind. At such low speed, an airliner doesn’t respond pin sharp to the smallest stick movements.
I discussed with the simulator designers that they should have a look at that. Apart from the final phase, the aircraft flew fine, very steady and easy to align for climbing turns or capturing of an ILS, for example. The throttles were non-back driven in the simulator. I understood this should change for the final implementation of the simulator.
Hi Bjorn, interesting project the MC-21. Different Autothrottle systems seem to be causing problems. Does this mean that the MC-21 has a different set up to Airbus and Boeing or is it similar to one or the other? I’m not an an airline pilot obviously.
As I hand flew all the time we did not test the auto-throttle function so I did not get an impression of the implementation.
Airbus was the first FBW civil airliner and implemented non back-driven throttles (i.e. then don’t move when the autothrottle is reducing or increasing thrust). All autothrottle implementations since has implemented back-driven throttles which is more natural for the pilot, I assume MC-21 will as well.
Airbus has of course stuck to their method, they want commonality in the cockpit between all types, it’s worth a lot to an airline. Once learned the non backdriven throttles poses no problem (as I saw when flying the A350), just something to get used to.
Perhaps I am just showing my Luddite side, but from the pictures, it looks like everything is a display – are we now past the point of back-up “old-school” instruments?
Hi Rick,
yes we are. The standby PFD instrument you see in the middle, above the landing gear lever is also a display. The unit is self contained and includes air data unit and gyro and shows speed, altitude, course, attitude etc. Its a complete miniature replacement for the most essential information on the big displays. The time of the “old-school” mechanical instruments are gone, even as back-up.
Might add that the new Boeing Starliner is going almost full touch screen as well.It saves a lot of precious weight and is more efficient.
Not that it matters much, but the supplier of the active sidesticks on the MC-21 is in fact not BAE but a French-based division of UTAS:
https://www.flightglobal.com/news/articles/mc-21-ushers-active-sidesticks-into-commercial-aircr-411455/
As for the throttles, the Sukhoi SSJ already deploys a back-driven solution, and one might surmise that a modicum of commonality with this UAC stablemate would have been on Irkut’s agenda when designing the MC-21 MMI.
“Ratier-Figeac, UTAS’ Actuation & Propeller business unit, first began experimenting with the sidestick controllers in the laboratory in the early 1990s.”
Ratier started pre WW1 making propellors
Figeac is a picturesque town to the north of Toulouse
Thanks Trident, nice that there are more producers of active sticks. This is the future, it has so many advantages and increases the safety in a two pilot cockpit.