Leeham News and Analysis
There's more to real news than a news release.



Bjorn’s Corner: Sustainable Air Transport. Part 30. Lilium Jet VTOL.

By Bjorn Fehrm
July 28, 2022, ©. Leeham News: This week, we analyze the Lilium Jet VTOL.
It’s a vectored thrust design, but it’s different enough in its characteristics from the vectored thrust VTOLs we looked at in Part 28 (Joby S4 ..) to motivate a separate article.

Figure 1. The final Lilium Jet configuration transports six passengers plus a pilot. Note the changed number of wing jets (from 24 to 20). Source: Lilium.
Lilium vectored thrust eVTOL
The Lilium eVTOL has a very different design from other eVTOLs. It uses (in the final configuration, Figure 1) 30 electric ducted fans to produce 30 jets that can be vectored from vertical to horizontal thrust, Figure 2.

Figure 2. Lilium propulsion concept with swiveling jets. Note the variable nozzle area. Source: Lilium.
The vectored jets are placed inside main wing elevons and canard elevators, Figures 1 and 3.
Figure 3. The main wing elevon with its built-in electric jets. Source: Lilium.
The propulsion concept of the Lilium Jet has advantages and disadvantages. Let’s start with the advantages:
- The canard design and the placement of the propulsive jets on the canard and wing avoid jet wash scrubbing drag and wing lift distribution effects (ref. the discussion from Part 28).
- The low mass flow and high overspeed of the jets give them a low thrust lapse rate (decline of thrust with speed). The design cruise speed at 10,000ft is, consequently, 150kts, about 20kts higher than other vectored thrust designs.
- The fans are housed in nacelle-type ducts. With careful fan/duct design and a variable nozzle area, the fan efficiency can be kept high for hover, climb, and cruise. With a perforated duct with sound-absorbing linings, fan noise is reduced.
But there are also disadvantages:
- The low mass flow/high overspeed jet design gives a very low hover efficiency. In Helicopter/VTOL speak, we talk about high disc loading. The hover power demand from the batteries is 2.2MW, unheard of in the eVTOL space.
- A canard design has a narrower center of gravity range than a tailed design. A canard can only operate with a positive lift, whereas a horizontal tail operates with both negative and positive lift to control the pitch of a vehicle.
- The integration of the jets into canard elevators and wing elevons (we assume the canard elevators operate in unison as the vehicle pitch elevator and the elevons in roll, with a secondary pitch/flap function) voids the design of additional pitch control by movables separate from thrust vectoring. This forces the heavy elevators (around 200kg each) and elevons (about 300kg each) to counter fast pitch and roll movements. It will require sizable actuators and high power flows to actuators and motors.
- Redundancy in pitch and roll control relies on the elevators/elevons to move in all scenarios. Their actuators will have high demands for power and redundancy.
The Lilium jet’s struggle with the transition
The Lilium project is in its seventh year, yet it has not transitioned from hover to forward flight during this period. The widely proclaimed transition in early June was a main wing transition, not a transition for the vehicle (canard + main wing). Such a transition is yet to be made.
Figure 4 to 7 is taken from a Lilium video where the main wing transition is shown. Observe that the canard at all time was in a vectored trust, stalled condition, Figure 7.

Figure 4. The Lilium wing in hover phase. The thrust is vectored about 30° down, and the flow over the elevon is still stalled (tufts in all directions) at a speed of 66kts. Source: Lilium.
Figure 5. The Lilium wing starts the transition. The thrust is vectored about 10°-15° down; the elevon is still stalled at the far end (tufts in all directions). Speed is 70kts. Source: Lilium.
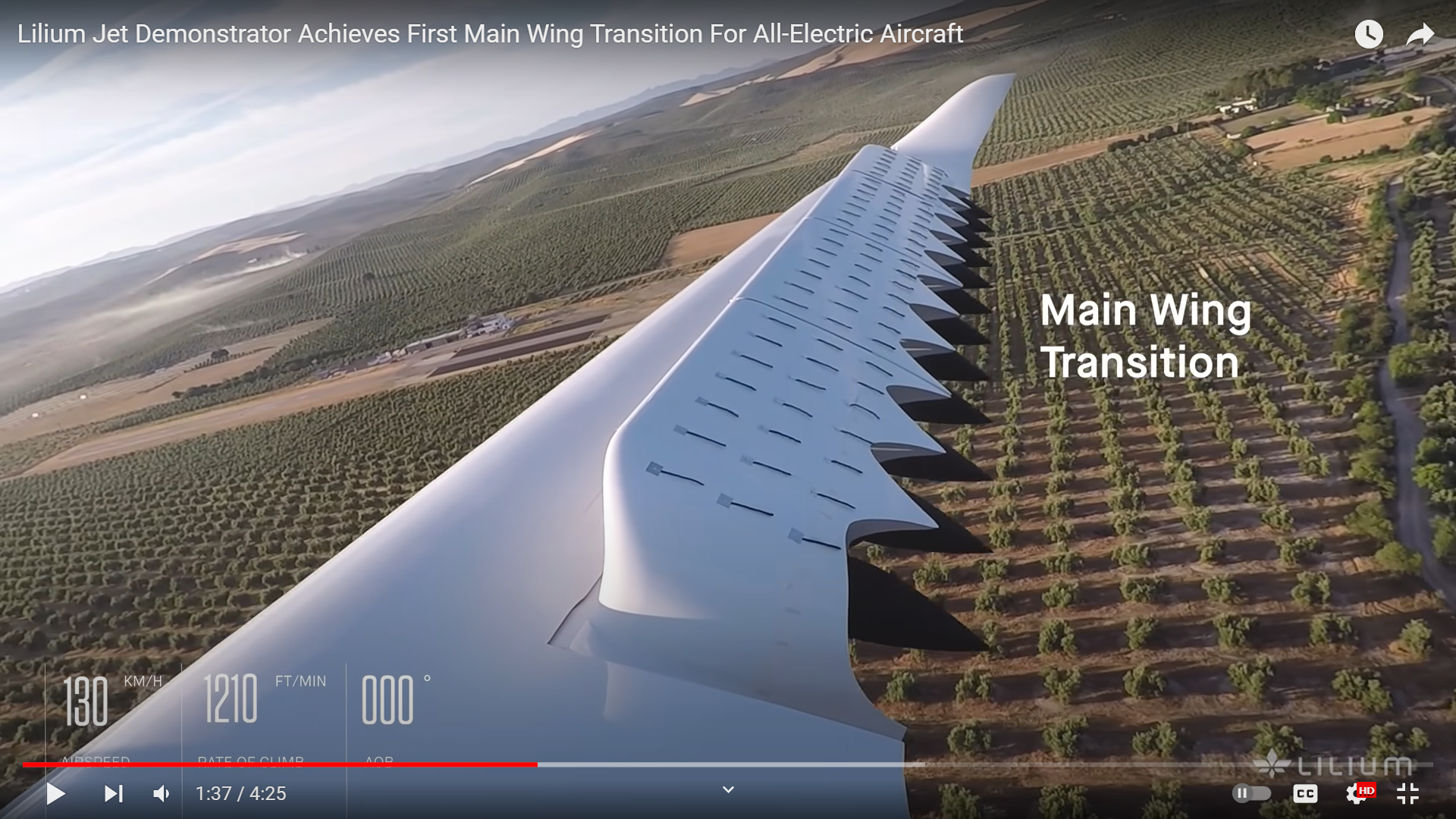
Figure 6. The Lilium wing has transitioned. The elevon with its thrust is vectored aft. The elevon has attached flow (tufts are aligned with the flow). Speed 70kts. Source: Lilium.

Figure 7. During the whole test flight, the canard elevator worked in vectored thrust mode at angles around 30°. The flow over the elevator was never attached. Source: Lilium.
The fact that a VTOL developer makes such noise about a transition from hover to forward flight of a part of the vehicle tells you a lot. Other VTOL OEMs transition to forward flight within months of the first hover flight. Why is it such an issue for Lilium?
The use of jets voids Lilium of help from a rotor wash to attach the flow around wings and movables. The integration of jet thrust and movable also voids Lilium of a fast movable control surface to counter the pitch disturbances that are part of a transition. The canard design augments the pitch control problem by forcing a nose-heavy design.
Figure 8 shows the transition control problem. As the jets are vectored to forward thrust, their vertical authority shrinks. With increased forward speed, the wing and canard move from deep stall to top of lift force (red arrows). It creates a sudden additional lift force. The problem is when canard and wing transition at different instances and speeds.
If the main wing transitions before the canard, the canard must compensate with a nose-up force to counter the lifting of the tail from jet thrust and lift. But the RPM-controlled jet lift authority is weak; at 30° degrees, it’s half, and at 20° one-third. Moving the elevator to a higher jet vector thrust drives it further into the stall, reducing its lift. If the canard transitions before the wing, the chain reverses.
Figure 8. The Lilium jet problem with diminished jet thrust lift authority and lift that moves in and out of stall. Source: Leeham Co.
The bottom line is the transition is a major technological challenge for the Lilium design. It will be interesting to see how it solves transitions with failed components and different loading of passengers and cargo, as required by certification requirements.
The hover power requirement
The jet thrust design creates a need for four times higher lift power than for other VTOLs. It requires larger/heavier motors and inverters, but the biggest effect is on the batteries. Batteries are characterized by their power delivery capability in kW and energy content in kWh.
Typical VTOLs have power and energy needs of around 500kW and 100kWh. Lilium ups this to 2,200kW and 300kWh. The extreme power demand at all battery SOCs (State Of Charge, see below) has forced Lilium to engage with a special cell developer, ZENLABS, to produce a battery that can deliver the power.
While we agree with Lilium’s assertion that the power-hungry vertical takeoff phase is short (Figure 9), the real problem will be landing in bad weather and the resulting reserve requirements for vehicles like the Lilium jet.
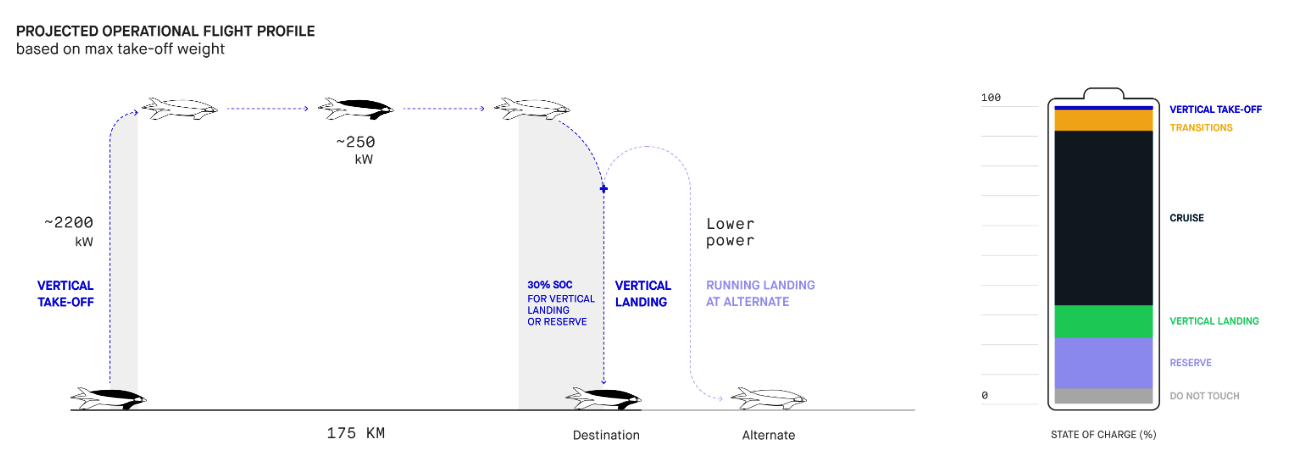
Figure 9. The MTOW power and energy profile as presented by Lilium on Lilium’s Battery blog. Source: Lilium.
Here is where we don’t agree with Figure 9:
- You don’t assume a battery system with 100% SOC (State Of Charge). It means a brand new battery system. You shall specify the SOC at the end of the battery’s life (the worst operational case). Typically maximum SOC is then 85% to 90%.
- The calculation assumes that 20% of SOC is OK as a reserve. It gives us ~54kWh (300*0.9*0.2) reserve energy. If you have to search for a landing place in bad weather, you very likely will do this while hovering. Hovering power consumption is 37kWh per minute, which gives us 1.5 minutes of reserve time to search for a landing spot.
- The above means that the reserve must take a much larger part of battery capacity and that the practical operating range of the Lilium jet will be well below 175km. It will all be decided by the reserve requirements for VTOL by the regulators. Today’s helicopter requirements call for 20 minutes VFR or alternate + 30 minutes IFR reserves at cruise condition (where the Lilium consumes 3kWh per minute). An approach and landing shall be possible before and after the consumption of the reserve energy. There is a 2-minute VTOL reserve in discussion, but this applies to flights along fixed pre-recced routes (with landing spots at 2-minute intervals), a far cry from the air-taxi aspirations of the Lilium jet.
Summary
Lilium, like all VTOL OEMs that are investor financed, makes inflated claims about operational capabilities such as range. Where Lilium will land with its claims will largely depend on how Certification requirements will affect a design with a difficult transition phase and very high demands on battery power when hovering.
Fascinating, thank you, both in clear explanation of the transition problem and the reserves. If we work through the canard transitioning first, surely the transition issue is easier? Canard transitions first, so there is a significant nose up force, but as the plane is front heavy, you move the canards up, taking the aerodynamic lift off the canard and allowing the nose to drop; gravity then assists you as you accelerate, helping the main wing transition. Meanwhile, the canard is less loaded, reducing the propensity to stall as well.
However, this does beg the question as to why they tried the main wing transition with the canard stalled if that is not the planned order of events in operation?
Thanks
Great article, very interesting, thanks.
But can you be more careful with your descriptions –
“Hovering power consumption is 37kW per minute”, should surely say “Hovering energy consumption” ? Hovering power requirement is 2200kW, hovering energy consumption is 37kWh per minute.
Likewise, cruise power is 220 kW, therefore “at cruise condition (where the Lilium consumes 3kW per minute)” should say “consumes 3kWh per minute”.
Seconded, I had to re-read to make sense of it.
2200 [kW] / 60 [min/hr] = 37 [kWh/min]
Thanks, corrected.
Its seems ultra clear to me what Bjorn has said
“Batteries are characterized by their power delivery capability in kW and energy content in kWh.
Typical VTOLs have power and energy needs of around 500kW and 100kWh. Lilium ups this to 2,200kW and 300kWh.”
There are standard measures – kW and kWh.
Clearly if the power required is 2,200kW and the battery is 300kWh it is only 8 min worth of energy at that output . Thats a peak of course and maybe 2 to 3 min is more usual.
They might operate mainly in Short Take-off mode and similar short landing avoiding most of the transition problems at different c.g.’s and use the wing lift and high engine nozzle speed as much as possible. One could improve roll control with wingtip/extended canard air nozzles like the Harrier. I guess they will not reach speeds for aerodynamic modes like Dutch roll needing a sizeable vertical tail. If they get stuck they have space enough for 2 ea large lift-fans between canard and main wing and can move the canard up making a entrance passage to the cabin underneath them. Also for de-icing how all electrical motors will handle different anti-ice chemicals.
Disruptive battery technology is around the corner, it will boost Lilium Jet performance. Azul & NetJet ordered hundreds & they know their stuff! Love that can-do attitude
Page 12. https://investors.lilium.com/static-files/c5e47a4e-6707-4a72-8a9a-6eba48c0f04e
Disruptive battery tech has been “just around the corner” for going on 25 years now, and despite many billions of dollars in incentives has yet to appear.
There are any number of potentially groundbreaking technologies in development, and yet given that exactly zero alternatives have displaced liquid cell Lithium ion chemistry on a commercial scale, it is unreasonable to pin any sort of hopes on that changing in the near term.
So new proposed eVTOLs need to work with current batteries, any hand-waving about “disruptive battery tech” isn’t worth the electrons it’s printed on.
Agree, but many e-VTOL programs seem build around the assumption power availability will dramatically improve overtime. And tech firms getting funding from less knowledgeables based on it.
based on a Bloomberg story on the eVtol market
https://jalopnik.com/the-future-of-flight-keeps-crashing-and-burning-1849348377
‘All are racing to bring small, electric VTOL aircraft to market before the rest, but none of their planes have the reliability needed to succeed.
Some of these failures stem from physical components, like combusting batteries, but others are the result of simple software issues. Bloomberg specifically called out one prototype that “erroneously thought it was on the ground, shutting off power in flight” and leading to a crash. Another, the piece says, encountered a programming error that caused it to lose all control in midair.”
Lilium is currently hyping their “executive” 5 seat model. I would be willing to bet the vehicle can’t lift 7 people, and they know it, so they’re trying a bait and switch.
It would also not surprise me if the project is a European Theranos.
-Lilium at the moment are claiming that their 7 seater at MTOW will have a range of 175km with reserves for a small hold & divert and a go around. When down below 20% SOC they can still land on a conventional run way. When empty (I.E. One pilot) they can operate to 250km. I assume a 4 seat executive model could handle 200km or more if the weight were used to carry extra battery.
-The ‘magic range’ that the uBer Elevate White paper predicted would be critical to maximize profit would be 100 statute miles /162 kilometers as it would attract ‘super commuters’. This is perhaps a 2.5 to 3 hours journey in a car and maybe 40 minutes by LilumJet. To which we may need to add 20 minutes transit to and from vertiport leading to 60 minutes total journey.
The one multi millionaire I know doesn’t mind a bit of a walk and religiously counts his 16000 steps/day.
I think its fair to say that 175km is getting close to 160km but that battery improvements will eventually exceed this.
Bjorns objective analyses & summary seems to contain a message, warning we all are hesitant to name. Because so many talented colleagues are involved while many other people invest in these EVTOL projects. There’s a positive innovative vibe and no one wants to be a spoiler. Writing on the wall seems b.u.b.b.l.e.
Yes, the cost will be too high initially with pilot, the volume will come as they are certified for autonomous flight with a datascreen instead of a pilot and are thru initial reliability problems in real life operations. I am happy lots of people and talent will work hard “burn & crash” before a few successful manufacturers start serial production after the rest of the system is in place with ATC, skyports and certification standards for all parts of the system.
Fully autonomous vehicles and passenger flight will become a reality, the ducks are beginning to line up. The 5G cellular contains a service called “positional services” which is designed to support autonomous automobiles and also aircraft, RPV, Drones etc. The accuracy is at worst 10m (enough to replace GPS etc) but 30cm when set up and used for autonomous vehicle modes on public roads and in private networks. (5G can be purchased and operated privately in factories, officers or large complexes). I think it will be foolhardy to rely on GPS. Galileo, GPS, GLONASS and Biju as the satellites might be show down in a global war or collapse during a zombi apocalypses and its best to have a separate system. Vertiports can then operate their own 5G cellular networks to support precision landing or those networks may be a public resource.
We will see what standard they choose for helipad landings/take-offs, I assume microwave, radar, multispectral vision systems (IR, Radar +Camera) and laser (LIDAR) systems will be in the competition as well besides 5G and Wide area augmentation system to get GPS errors down to better than 1/2″. One would hope the USAF/US Army will invest and test to speed up the development and the FAA get involved to issue the regulations. There might be cheap technology from the car industry anti-collision systems to develop for UAM’s
Whatever the system is it will need to be cheap, need no maintenance and must be reliable. That should involve disposing of as many aviation legacy systems as possible. They’re simply to cumbersome and expensive. GPS and 5G positional services are cost effective. LiDAR is possibly affordable. Camera photogrammetry is affordable.
I would love to see someone that would care about the country folk we would like to have an evtol vehicle to fly to Walmart with our wife and have enough room for groceries to bring back to the house. Most Walmart stores have electric charging stations now but no one is thinking about us we would love to use it for the short hops like 30 miles to Walmart charge it back up and fly back leaving our gas vehicles for longer trips. Thank you.
I love the idea except for the price tag.
I don’t think that consumer marketing is in the cards and as far as I know there are no current plans to sell directly for individual ownership.
I think your dream will come true.
This is Jetson One: a personal H platform octocopter/quadcopter:
https://youtu.be/1m07Y0Btgt0
It weighs 86kg (about 189lbs) empty and with an 85kg(187lbs) pilot can fly 20 minutes at 60mph/102kmh. It has Lidar to avoid collisions and a parachute. Cost is USD$92,000
If you increased the weight 5 fold to 450kg (1000lbs) there would be enough size to allow two larger passengers, full cabin enclosure and small payload and a bit more range. So perhaps 30-35 miles (60km range). Jetson are in fact working on a certified 2 seater. It’s not much range but if you have bad roads, hills or rivers to cross it’s going to be attractive.
Take a Tesla?
-Again I think folks are far too sceptical.
-To achieve its performance objectives LilumJet requires battery cells that can provide 300W.Hrs/kg energy and 2500Watts/kg Power for less than 20 seconds during the vertical phases of flight at the take-off and landing stages. Yes this means the batteries will need to discharge at the 8 minute rate (C8 rate). Once in level flight consumption drops by a factor of 10. This shouldn’t be viewed as a disadvantage. Being able to discharge at the C8 rate means it can be recharged at the C8 rate as well. The Uber Elevate White Paper concludes that there will be no time for charging and so battery swaps will be required. Swappable Battery Packs add considerably to weight but it looks like Lilium can transcend this.
-Current state of the art commercial battery cells have an energy density of 450Watt.Hours/Kg. This is already 50% more than Lilium needs.
-Lets have a look at the issue of an alternate landing area. Lilium will not be operating using anachronistic junk legacy standards of VFR rules. It will be able to land using a precision landing system in a pea soup fog in the Rhur Valley or similar.
-Most airports have only 1 or 2 runways. A vertiport can easily have 8-20 tennis court sized landing pads with wells separated on opposite sides of a building so that an incident on one does not impinge on the other. An alternate vertiport can be a tennis court sized pad 100m away. Hence we don’t need long divert or hold reserves. They’re simply not needed and pointless.
-Now the issue of transition. Lilium started work 7 years ago with an extremely ambitious and idealistic goal as a startup. Its first 3 demonstrators (really test beds) didn’t even have foreplane wings for the canards but simply ducted fans. I presume the power requirements were so ambitious. The 4th and 5th clearly have the full system.
-Saying Lilum and its founders are fraudsters is I think a libel and a slander of the 3 young men that started Lilium. Lilium has 5 flying test beds. Lilium has achieved transition of the aft wing. Theronos had nothing. Its tests detected nothing.
-The issues of transition are being over stated I think. At 45 degrees the foreplane flap jets will be producing 70.7% of its thrust as lift and 70.7% as forward thrust. It would thus require 141% thrust to hold level. At 30 degrees 50% of the thrust would resolved to lift and 86% to forward thrust requiring 200% thrust to hold level. To me it looks like attachment of airflow of the aft wing flap occurs at around 20 degrees at which point 34% of the thrust resolves as lift requiring 300% thrust. However the foreplan wing and its flap are producing lift and its wrong to assume that the is no aerodynamic lift at 30 or 20 degrees. It should be a considerable amount. The Cl is perhaps only 0.33 of Clmax but that should be enough. One simply increases the speed of the aircaft to twice minimum flyging speed. There are other ways such as borundary layer suction or splitting the flaps into 3 and transitioning one pair at a time. A way will be found.
-LiliumJet is having its undercarriage improved and will be able to conduct STOVL operations. Obviously and airaft that can support itself can accelerate at 1G and its obvious that even a 0.5G acceleration will produce transition during the takeoff roll within about 160 meters.
Sorry, but your battery numbers are wrong. You can’t buy a battery that does 450Wh/kg at a battery level and 2000 cycles. It’s already difficult to do 250Wh/kg at a battery (not cell) level with 2000 cycles. I don’t even want to start talking about liquid cooled in this context or structural integrated batteries that Lilium is talking about …
https://amprius.com/
You can purchse 450W.Hr/kg cells from amprius right now. These are being used in high end applications such as satellites. 400W.Hr/kg versions
https://www.electrive.com/2022/02/17/amprius-delivers-450-wh-kg-battery-cells/
“Specifically, Amprius’ three product platforms, high energy cells that are over 400Wh/kg, high power cells that are 6C continuous discharge capable, and balanced energy and power cells that are over 390Wh/kg and C/5 continuous discharge capable, can all be used to enable performance unattainable with conventional batteries”
Much is and has been said about the technical possibilities. I`ll take a look at the business perspective, as that`s a major point for sucess.
My point is: It`s technically possible, or at least thinkable.
I don`t like the Lilium approach and I`m highly sceptical it will be sucessful. It`s a moonshot for sure, but everyone knew that.
Many of these fail by nature.
While each of the technical challanges might be somehow solvable, the sum of the “ifs” and “whens” and “maybe their approch must be changes” will be not.
30 ducted fans, why fly 30 engines, if so far 2 have to be shown as ideal solution?
You can go through the list of design choices, and will realize that all of the revolution sounds one to many, at least.
And there`s the question for what? Is electric flying somehow more enviromental friendly, if you don`t have a proper engery source to load the batteries with?
The main point is the market though.
With given tech, we look on a low range vehicle – even if it`s more than 175km, let`s say 300km, who is it up against?
Premium cars and helicopters.
1st will be hard to impossible to beat cost wise, and even time wise it will be difficult, as it needs a helipad or airport, together with traveling time, change of transport means etc. it won`t be much faster. It also runs into the typical last mile issue.
Helis have their usage, but that`s a niche market that never ever justifies this investment and it will be extremly hard to compete price and cost wise.
With defenitly limited payload, the VTOLs will face a serious market challange, as today this market is covered, doesn`t exist and have to be build or can not be adressed with that solution for acceptable cost and price.
It`s also not easy to develop the infrastructure, get the certification and an operable business model.
I have doubts that Lilum will work, or be better. And there`s another major point, if you drag more ppl into short haul flights, the overall energy consumption will rise. So you`ll have more – not less Co2.
A car needs about 15-20l of petrol for 200km, that`s not a lot if you compare it to the energy needs of Lilium as we discuss.
It`s just damn expensive to lift 1,5t of the ground and bring it to a couple of hundred meters.
Sash seems right. For many realism seems pessimism & you don’t want to look like a pessimist, bad for your carreer, so better cheer with the crowd & believe.
Veterans have seen the CROR’s, flying wings, flying cars, mini jets, biofuels and VR cabins becoming the future in the past..