Leeham News and Analysis
There's more to real news than a news release.
 Leeham News and Analysis
Leeham News and Analysis
- GE testing of giant GE9X engine aims for maturity at entry into service June 30, 2025
- Bjorn’s Corner: Air Transport’s route to 2050. Part 28. June 27, 2025
- Parent agency, FAA often at odds as politics outweighs safety June 26, 2025
- Electric Flight and the Ugly Duckling June 25, 2025
- Engine makers tout “Plan A” but have “Plan B” backups in R&D June 23, 2025
Bjorn’s Corner: Sustainable Air Transport. Part 38. Piloting the VTOL

By Bjorn Fehrm
September 23, 2022, ©. Leeham News: Last week, we looked into the hardware needed for the Flight Control System (FCS) of the eVTOLs in development.
We could see the redundancy of the FCS had to be extensive as the tricky hover to forward flight transition demanded a full-time Fly By Wire concept with no direct mode backup.
Yet the FCS hardware demands are not the main problem of a safe eVTOL FCS. The pilot interaction is. Not because it’s tricky. Because every project does it their way.

Figure 1. Pilot flying the Joby S4 simulator. Source: Joby Aviation.
Piloting an eVTOL
The way a pilot flies a fixed-wing aircraft has been the same for 100 years. For a helicopter, it’s been the same for at least 70 years.
I have flown 15 different aircraft types and some helicopters (and about double that in simulators). They are all controlled in the same way, Figure 2.
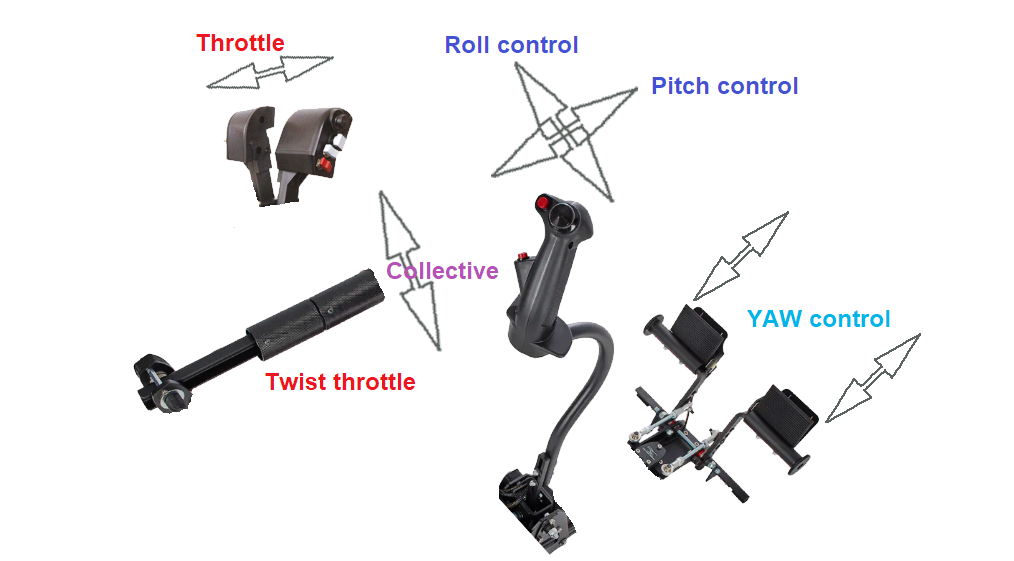
Figure 2. The controls for fixed-wing aircraft and helicopters. Source: Leeham Co.
- The pith of the aircraft is controlled by stick/yoke forward (nose down), back (nose up), left (roll left), right (roll right).
- Yaw is controlled by pedal left (yaw left), pedal right (yaw right).
- Engine power is controlled by throttle forward for higher power, back for less.
- A helicopter has a collective instead of throttle with a throttle twist grip. Collective up causes the helicopter to climb, down to descend.
For a pilot, it doesn’t matter if it’s a stick or yoke or if the throttle is left or right. The movement pattern is the same (I’ve flown it all, it works).
We have over half a million trained pilots who have these flight control principles engraved in their muscle memory. This is an important part of flight safety, as a human being changes behavior when faced with a threatening situation.
He reverts to instinctive action. The brain is no longer in the loop; his inputs to the aircraft rely on what’s engraved in his muscle memory to counter the threatening situation.
If the control method of the vehicle differs from what is standard, the risk of dangerous mistakes in crisis maneuvering of the vehicle increases.
The controls of eVTOLs
There is no agreed way to control eVTOLs. It’s a new category, and no standard has been prescribed, nor has it developed. I have studied the cockpits of different VTOL projects and observed videos from simulator and test flights.
There are no two projects that use the same control method for the aircraft! Only one uses a method described above.
The projects seek an “optimum” input method. The ensuing variation is all over the place:
- Stick forward<>back controls pitch angle
- Stick forward<>bak controls altitude
- Stick left<>right controls roll angle
- Stick left<>right translates the vehicle left-right
- Yaw input via pedals
- Yaw input via rotating stick
- Altitude control with collective
- Altitude control with stick
- Altitude control via throttle
- Altitude control via trim button
- Speed control with throttle
- Speed control with stick forward<>back
- etc., etc.…
While I realize that the idea is to further the innovation level for how to control a VTOL, this variation is not good for the industry and is a serious threat to flight safety for eVTOLs.
I know, as does any self-observing pilot, that my behavior in a crisis, like if hit by a wind shear/gust when landing on a skyscraper vertiport, my actions would be muscle memory controlled. These likely revert to how I learned to control an air vehicle for the majority of my career in such a situation.
It will not follow some new clever principle by a VTOL manufacturer that I learned in recent conversion training. This is a serious safety threat to the emerging VTOL industry, and it seems the regulators are doing nothing to counter it.
The supply of pilots to the VTOL industry
The absence of any standard on how a VTOL is controlled will also negatively affect the training and supply of pilots for the industry.
Over the last decade, there have been shortages of qualified pilots for the air transport industry. The emergence of thousands of eVTOLs will bring this to a major crisis. The non-standardization of how you fly a VTOL will exacerbate this crisis.
Training and its tools like simulators will be special for every VTOL, and the requalification of a pilot from one VTOL type to another will take longer and be more costly than if there was some standardization of how to fly the VTOL. Critical situation training will take longer and be more costly as the situations must be repeated until the pupil has reprogrammed his muscle memory.
For fixed-wing aircraft and helicopters, there is also standardization on how instruments and flight information displays are laid out. It’s a de facto standard but how the standard came to be is non-important.
A pilot can jump from one type to the other, and the control inputs and where to get what information is familiar. Will the VTOL industry mess up the flight displays as well? We will have to wait and see.
Thanks again Sir… Have wondered about this, and agree that it is crazy stupid not to standardize the hot seat at least. Also appreciate your yeoman efforts on explaining the MAX mess. Still hard to believe really, and as a risk analyst…I think we’ve found a couple…
Very important points raised.
I recall an accident in Russia, Aeroflot Flight 821, when pilots under stress wrongly interpreted the artificial horizon in a Boeing aircraft, because in the Soviet union the artificial horizon was displayed inversely. Definitely a safety issue!
UAM’s might get auto flight before the market takes off. Then flights will consist klicking on the screen were you want to land and i.d. of pax, the rest is automated including mass and balance.
@Claes, I don’t know how the FAA,EASA,TCA etc will like this option ; that is to give total control of the flight to a computer with human passengers on bord , it one thing to have a drone crash because of computer malfunction, but it quite another thing to take the risk with passengers. Especialy in bad weather or with others flight problems, if no pilot can take complete control and do a manual flight I don’t think the regulating parties will allow this ,at least not in the forseeable future. Tesla has so much problem with their autopilot that the NHTSA is investigating it, and they are not even in the sky! And if they allow for manual override, well Bjorn points in this article comes into full play.
@Bluedog, the emergency pilot is on ground if needed if not an evolution of the Cirrus emergency landing system is sufficient. Check latest “The Air Current”. I think it will come but cannot say when it will be certified.
Brilliant analysis, anomy d right on. The divergence of standards in transport airplanes with Airbus “innovating” their FBW in the A320 may or may not have caused similar pilot reactions, but they certainly have had an economic impact on the cost of maintaining a discrete pilot pool for each and transitioning pilots back and forth as seniority rules affect pilot career progression. Airbus sought to differentiate their product with improved technology only because FBW enabled the side stick, and they complicated the pilot interface by forgoing tactile feedback through non-linked captain & F/O side sticks, exacerbated by an autothtrottle that managed thrust without moving the thrust levers. Now we see variations on the side stick implementation with position. and force feed back, which is gradually maturing the side stick toward the pilot interface inherent in yoke and wheel. The lack of. industry agreement on pilot interface is both a safety and economic issue, and it would be interesting to see the latter quantified. Thanks for pointing to the AMM UAM marketplace on the verge of committing the same or worse human factors sin!
35 years and you have not yet grasped the basic philosophy underpinning Airbus FBW, have you?
You’d fight it tooth and nail to stay “pilot” and not advance to “Commander”.
Bell/Boeing has already addressed the hover-forward flight control protocol problem with the V-22 and similar aircraft. Why not adopt that solution?
One of the key tasks of an experimental flight test pilot is to corral program managers when they start thinking outside the box of good sense.
‘The V-22 has both conventional airplane and conventional tandem rotor helicopter control surfaces. The primary flight controls consist of cyclic sticks located in front of each pilot, thrust control levers (TCLs) mounted to the left of each seat, and floor-mounted directional pedals. These controls are part of a fully digital, electronic, fly-by-wire system’
https://www.globalsecurity.org/military/systems/aircraft/v-22-flt-cntrl.htm#
Has interesting further detail and graphics on how it works. I have a feeling this isnt the direction they want to take on the new VTOL systems which only use vertical lift and dont seem to ‘convert’ into a normal plane with horizontal thrust
There are “islands of stability, advance” beyond the established “box of good sense”.
One Downer though is wrapping new stuff in old style paradigms. you lose so much.
-There are broadly 6 degrees of freedom: 1 forward/backward, 2 left/right & 3 up/down. Then there is 4 yaw, 5 pitch & 6 roll.
-I think we only need the first 4.
– it would be nice to be able to do it with only 1 side stick which could be say pushed fwd/bkwd, left/right, twisted for yaw and thumb wheel for up/down.
-Personally can’t wait for side stick controller automobiles. Maybe they should be compatible.😀
Seen something that says human hand including wrist has 23 DOF
-There would be 4 joints in each of the 4 fingers and the thumb, which makes for 20 in total. To which we can add 3 axis of rotation at the wrist. With practice they could all be controlled independently.
-Swami Rama was able to change the temperature of his hand at will. He could control the left and right side of the SAME hand not just the different hands of the body, so I suppose that’s another degree of freedom. Confirmed by US Navy Doctors.
-It’s all a matter of a little practice.
Most progress today is reducing demand on proficiency.
Bow, sword vs various types of guns.
“A pilot can jump from one type to the other, and the control inputs and where to get what information is familiar. Will the VTOL industry mess up the flight displays as well? We will have to wait and see.”
Reasonable concerns. In my opinion one of the biggest risks with the various e-VTOL design teams isn’t technical, but psychological: https://www.psychologytoday.com/us/basics/groupthink
There’s no way back, so they Must be right.
@CLaes , for the Cirrus emergency landing system that a good point I hadn’t think of that, it might be sufficent for the this part, as far as the emergency pilot on the ground, hopefully he can get acces to the EVOL from the ground (I.E. no problems of transmision between the ground and the EVOL) and can asset the situation quite rapidely and make corrections to land safely.
Off Topic: Lilium Jet achieves full transition on wings and canards.
https://youtu.be/ywJWka1evH8
Some intense looking banked turns. The moment occurs at about 1.25
A lot of those seemingly arbitrary input variations in eVTOLs obviously come from the drone/multirotor universe, which typically involves a controller with two levers/sticks. A long story, as even in drones there isn’t [total] consensus on how to use these levers.
Fun fact: drone controls evolved from RC aircraft controls, for obvious reasons. RC controls were broadly derived from real aircraft controls, adapted for “fingers-only” use.
So there is more than a little irony to the fact that these controls are now “re-re-evolving” into something for vehicles that will carry humans, BUT in a way that doesn’t necessarily agree with the original and still proven flight control concept, and with it, pilots’ century-old muscle memory for flight controls…