Leeham News and Analysis
There's more to real news than a news release.



Bjorn’s Corner: Fly by steel or electrical wire, Part 8
September 13, 2019, ©. Leeham News: In our series about classical flight controls (“fly by steel wire”) and Fly-By-Wire (FBW or “fly by electrical wire”) we discussed the flight control laws of Boeing’s 777/787 and Airbus’ A220 last week.
Now we continue with Embraer’s fourth-generation FBW, the one for the E-Jet E2 series.

Figure 1. The Embraer E2 FBW system is a closed-loop feedback design. Source: Embraer.
Embraer’s fourth-generation FBW
We discussed Embraer’s first-generation FBW for the E1 E-Jets in previous Corners. It’s an analog open-loop FBW resembling a classical flight control system but with control authority gain scheduling based on dynamic pressure and stall protection.
The flight laws for this first generation FBW was designed by an external supplier, Honeywell. For the second generation FBW for the Legacy 500 Business jet Embraer decided to take the design of the flight laws in-house. It created it’s own flight laws team including the team coding the laws for the digital FBW computers.
The resulting Legacy 500 FBW is known for its nice flight controls with full protection from stall and over-speed. The next project for the FBW team was Embraer’s new tactical transport, the KC-390. Here the capability of a full authority FBW is used to ease the tactical flying for the pilots.
The replacement for the E-Jet, the E-Jet E2 implements the fourth generation FBW for Embraer. It’s an implementation which retains Pilot commonality with the E1, yet draws a number of advantages from its closed-loop feedback based architecture.
Performance improvement with FBW
The digital FBW implementation was used to improve the efficiency of the aircraft in areas of cruise efficiency but also take-off and landing performance. For cruise efficiency improvement, the static stability of the aircraft was reduced as the aircraft’s static and dynamic stability is at all times augmented by computer-controlled flight laws, Figure 1.
This is possible as computerized flight laws are active both in Normal and the backup Direct mode. Direct mode is invoked when the system detects malfunctions for sensors like Angle of Attack sensors, Air Data sensors, the Inertial platforms or a Flight Control computer (it has three computers, all dual-processor designs with self-checking). Despite failing sensors or computers, its redundancy is such the FBW keeps pitch damping despite being in a degraded mode.
The always-on pitch augmentation allows an efficiency improvement by moving the wing further forward for reduced static stability and by it, less tail downforce drag, Figure 2.
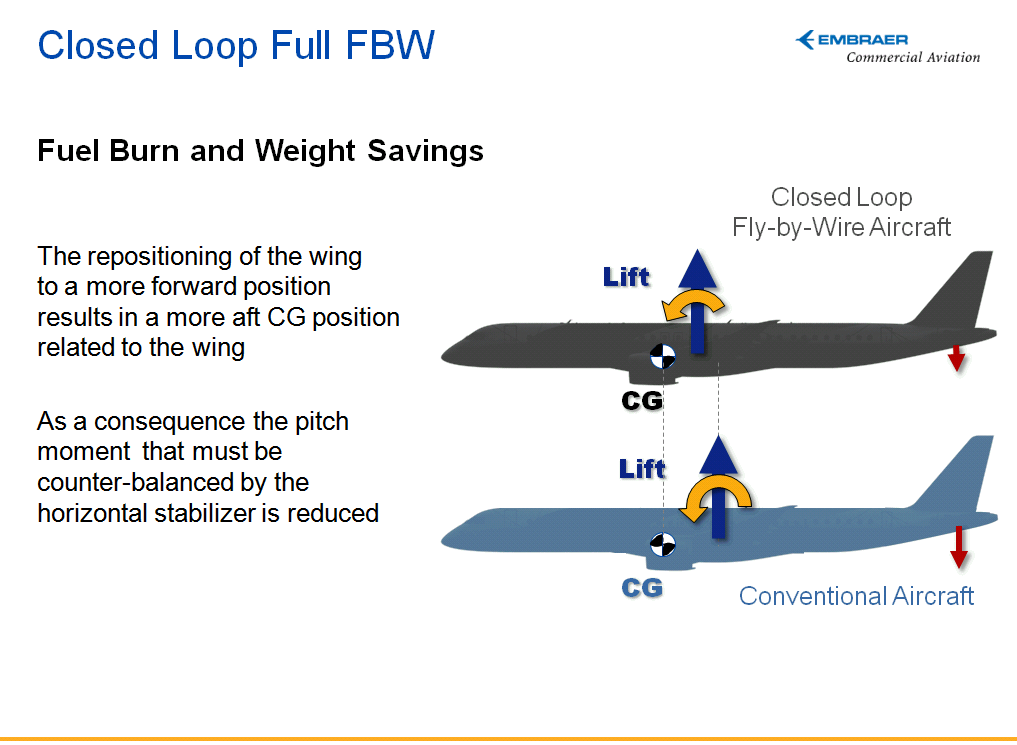
Figure 2. Reduced tail downforce improves cruise efficiency. Source: Embraer.
The reduced force needed in turn allowed a reduced horizontal tail stabilizer surface, reducing weight and wetted area drag. In total the relaxed static stability contributed a 1.5% improvement in aircraft efficiency, Figure 3.
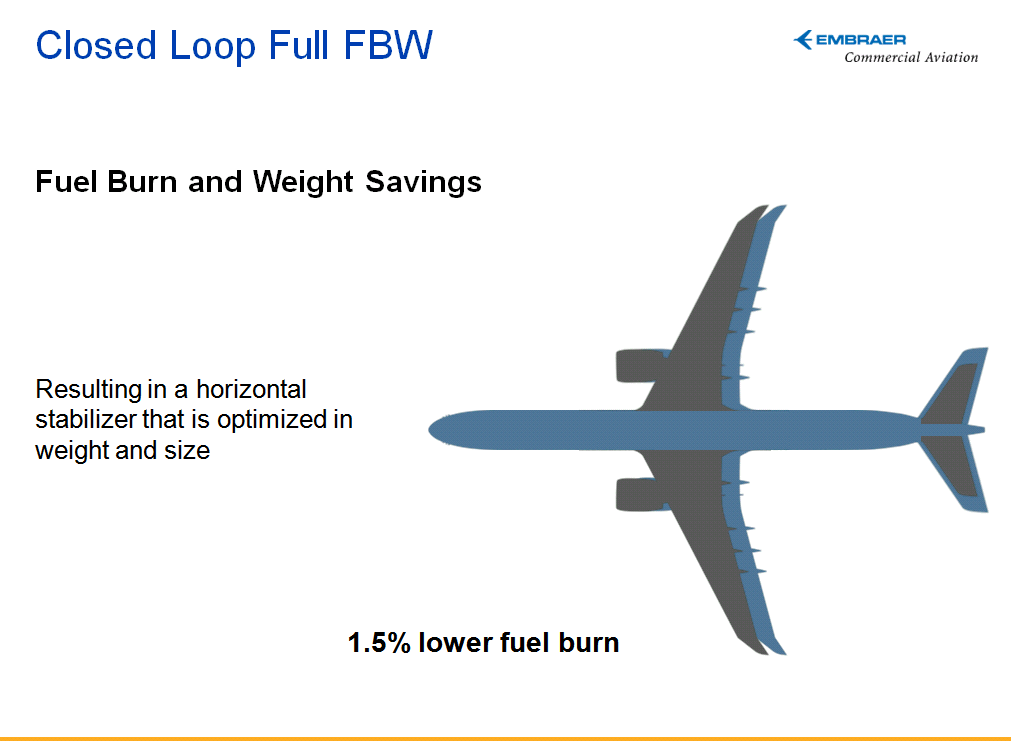
Figure 3. Overall improvement from the FBW for the pitch channel. Source: Embraer.
The E2 FBW also implements wing load alleviation through simultaneous deflection of the ailerons to mitigate gust loads, by it reducing aircraft weight further.
Pilot assistance in the E2 FBW system
The common Pilot type rating between the E1 and E2 E-Jets limited the team in what Pilot assistance it could implement but the E2 contains:
- Full pitch stall Angle of Attack protection compared with stall avoidance support in the E1.
- Full over-speed (Vmo and Mach tuck) protection (the E1 has only Mach tuck protection).
- Excessive roll angle protection (the Pilot must deflect stick continuously to roll past 33° roll).
- Turn coordination with pitch compensation (the Pilot rolls for a turn but need not kick rudder nor apply pitch up to keep altitude).
- Engine out yaw correction (beta angle support).
In summary, the E2 FBW is an important component in the improvement of the efficiency of the E2 generation of the E-Jet and it gives the Pilot additional comfort and safety over the E1 FBW.
In the next Corner, we will discuss how the different Flight Control solutions handle the flight augmentations needed for modern airliners like the 737 MAX MCAS system.
Moving the wing forward introduces an issue with the position of the MLG which must also move with the wing. You’d want the MLG to be back where it was so that the aircraft doesn’t so easily sit on its tail when on the ground (nothing to do with aerodynamic considerations).
I was lucky enough to look round the E2 the other day and I noted that the MLG on is of the upside-down type as on some fighter planes with sharply swept wings. A fixed main strut, with an articulated lower link proceeding aft and with the shock absorber forming the third side of the triangle between the end of the link and the top of the strut. This keeps the main wheel further aft than it otherwise would be if it were at the bottom of the strut like on a 737 or 320.
I thought it odd at the time – I guess this might be the reason.
Due to the horizontal stabilizer in the back pushing downwards why are there no big canards in civil aviation nowadays?
I suspect it’s because the canard’s spar or whatever structure is used to support the high canard is right where the cargo or passengers want to be. The Lilium people however say that the canard is ideal for eVTOL, which in their case is a low canard.
“The always-on pitch augmentation allows an efficiency improvement by moving the wing further forward for reduced static stability and by it, less tail downforce drag, Figure 2.”
That sounds as if active systems are being used to allow design features that improve operational performance of an airplane even though those design features do not meet the traditional criteria of a perfectly stable manually controllable aircraft. Hmmm….
I think the term is “relaxed stability” as opposed to actually unstable. The stability margins are reduced but it’s still stable. In practice flying such an aircraft manually in open loop (eg without pitch rate information) direct law might involve more care to avoid a stall but I’d say Embraer are at the point this is completely implausible and purely hypothetical. By measuring and controlling say pitch rate you can for instance increase rotation rate without danger of tail strike thereby reducing takeoff roll. I suspect Airbus entered this territory with the A321neo with the flex cabin. They were able to add an extra row of seats by moving equipment back. 2.5%-3% more seats effectively on top of the 16% reduced fuel burn for the new engines. Simulations (Not Flight Tests, not in service reports) have shown a potential for excessive pitch with flaps out in landing mode during dynamic manoeuvres so EASA has issued an directive requiring the aircraft to be less aft loaded until Airbus update the flight control laws. Lufthansa has dealt with the issue by blanking of the last row of seats.
I suspect there must be a direct undamped mode when there is a failure of all angular rate sensors as well. (Presumably there are 3 pairs of duel MEMS angular sensors to measure pitch,yaw and roll cross checking with each other). Unlikely to ever occur but I expect the that the software has been programmed for the essentially impossible scenario and aircraft still to be completely flyable.
What I am curious about is the scenario of what happens when there is a total failure of air data sensors (pitot/prandle and alpha vanes) but inertial data (velocity, acceleration, altitude) is available. It should be possible to estimate indicated airspeed, angle of attack from inertial and attitude data and retain normal mode.
787 uses the GPS system to replace Pitots if they go out.
I don’t know anyone else does that (that being Airbus)
i do wonder if this is another FAA lenience thing.
( There seem to be other things that the FAA is willing to certify for US airframers that EASA does not like ( but forced to accept from the US.)
There has been 787 airspeed issues
“Flight data from the occurrence shows that the voted airspeed value became erratic for approximately 17 seconds. The voted airspeed values deviated significantly below the independent AOA speed calculated by the aircraft flight computer. As indicated in Figure 1, the voted airspeed was NCD for more than 0.1 seconds twice throughout the event.”
Jetstar 787-8 VH-VKE 21 Dec 2015
https://www.atsb.gov.au/media/5773029/ao-2015-149-final.pdf
The B787’s “Alternate Air Data System” is a good system. Had AF447 had one it may have survived its crews disorientation from pitot tube freezing up.
Bjorn, it would be very interesting in your corner if you could explain the equipment required for the various FBW / fly by steel types, and the differences between Boeing/Airbus/Embraer etc.
I.e. number of Pitots, AOA, FCC, ADIRU… and how they interact. What are the design philosophies between each.
I seem to remember that the A350 had an additional backup for the airdata systems that involved the engines ?
I would also be interested in the two out of 3 computer failures.
If two computers are lefty and one goes off the range, what is the decision logic that determines which one is still good?
If I understand it if all 3 go you are done for other than a controlled crash.
pull two of the three offline and see what happens seems to be the current thinking..
https://aviationweek.com/commercial-aviation/german-investigators-cast-wider-net-frozen-aoa-sensors-pamplona-dive-incident
The 3 computers are in fact 3 duel processor computers. Im not sure how the processors pairs have been designed to behave by Embraer. There are two main possibilities. One way would be for each processor to cross check congruence with the others data outputs and impeach or self impeach itself if incongruent. Another way is for one CPU to back up the the second in case of failure. One method assures integrity of data but the other high availability. I suggest the former. Either way I’m sure the Embraer can fly on only one computer, perhaps even only one processor of each computer. I suspect each processor will have a MEMS rate gyro on a chip similar to that on a cellphone to provide yaw and pitch rate information even if the more accurate INS is out.
Philip said
“So there is no direct cable between the flight deck controls and the control surfaces. One exception, manual trim. But then humans can use it.”
Once again take the time to READ the following link- you are wrong wrong wrong
Please provide a credible source for your view of electrics and hydraulics being the only way to control a large jet.
The author of the links below has a working knowledge of flight controls at Boeing
https://www.satcom.guru/2018/11/stabilizer-trim.html
‘….Pioneering airplanes like the Boeing 707 used a mechanical control system to drive the elevator trim tabs.
The Boeing 737 uses Power Control Units (PCU), a hydraulic actuator, to drive the elevator. The indirect control introduces the need for an elevator feel computer, to artificially provide “representative aero loads” onto the pitch control yoke with a variable “neutral shift”
Which is followed by some excellent drawings-descriptions of the CABLE linkages involved
There are three means to move the stabilizer:
1. Mechanically through a cable attached to control wheels in the flight deck
2. Manual electric trim motor commands from the pilot through control yoke switche
3. Automatic electric trim motor commands
In addition try the links available in this forum re Bjorn
https://leehamnews.com/2019/09/13/bjorns-corner-fly-by-steel-or-electrical-wire-part-8/
which give a very complete description of the two systems- FBW and Cable
IF you take the time to read the complete series
Thank you !!
Closed minds that don’t get the significant differences in the two systems.
Two completely different approaches to deal with the same redundancy issue are required.
My pickup does not have anti lock. It does not mean its not controllable.
Boosted controls go way back as does the need to have artificial feel built into the systems.
I ran a lot of bump and steer trucks, didn’t care for them but they worked.
Rack and pinion has much better feel.
But for a big rig the bump and steer was deemed better. Probably a lot less complex and rugged for the job.
Just a note about a distinction here. Boosted hydraulic controls are different from fully powered “irreversible” hydraulic controls. In boosted controls (also called power assisted) the control surface is deflected by a lever mechanism which provides about 5:1 mechanical advantage which moves the control surface directly but also moves the spool of a hydraulic valve that uses hydraulic rams to move the fulcrum of the lever. As a result the ailerons of late war P38J lightning fighters were 18% manual deflection and and 82% power driven deflection. Fully powered controls provide all force hydraulically and there is no force feedback. This is desirable as transmitting force feedback can cause Pilot Coupled Oscillations from flutter or shockwave impingement. These systems require artificial force feedback derived from airspeed. Aircraft such as the DC8 could be flown without powered controls using spring servo tabs but such devices can be prone to flutter. In the American Eagle Flight 4184 the wings experienced stall due to icing which caused aileron lockup and reversal of the unpowered servo tab ailerons. I suspect powered controls would have allowed a greater chance of the pilots recovering control.