Leeham News and Analysis
There's more to real news than a news release.



Bjorn’s Corner: Flight control, Part 4

By Bjorn Fehrm
1 April 2016, ©. Leeham Co: Last week we described the computer augmented flight controls that are possible with Fly-By-Wire (FBW) systems. We described the most common flight control laws by discussing the two most common control law implementations in the market, the Airbus and the Boeing ones.
Today we will finish the series by discussing how an autopilot, or as the OEMs call it, an Autoflight or Automatic flight system, is added to the aircraft’s control system. An autopilot is most of the time combined with a flight director and a Flight Management System (FMS).
We will mention how these fit in the picture but focus on the autopilot, once again to keep it simple and avoid trying to cover too much. The autopilot subject is large enough.
Autopilots
Autopilots work by off-loading the pilot the direct hands-on flying of the aircraft. Constantly guarding an aircraft from the different oscillating flight modes we went through two weeks ago is tiring. On top of flying the aircraft in a controlled mode, the more sophisticated autopilots can control the aircraft in a multitude of modes and help with procedure flying.
The principal way an autopilot interacts with the aircraft is described in Figure 1.
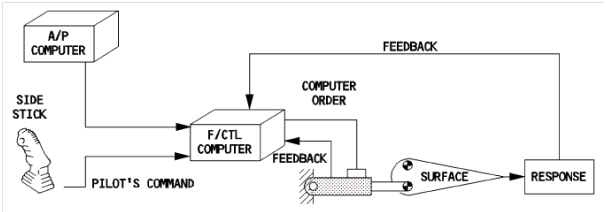
Figure 1. Autopilot layered on top of control system. Source: Airbus.
This happens to be a picture from the Airbus A320 implementation but Boeing’s block schematic is principally the same, Figure 3. The autopilot computer is in both cases layered on top of the basic flight control system. This is also the case with a classical mechanical control system. Then the autopilot needs to physically move the controls and therefore adds servos as interfaces to the aircraft’s controls.
Autopilot modes
As described previously, an autopilot can be as simple as a wings leveler or all the way up to an autoflight system which involves a flight director (FMS commands flight director who commands autopilot who commands FBW) and a navigation computer in the form of a Flight Management Systems (FMS) telling the autopilot where and how to fly.
Here are the basic modes of an autopilot as we go from take-off over cruise to landing. We start with simpler stand-alone autopilots (Figure 2),
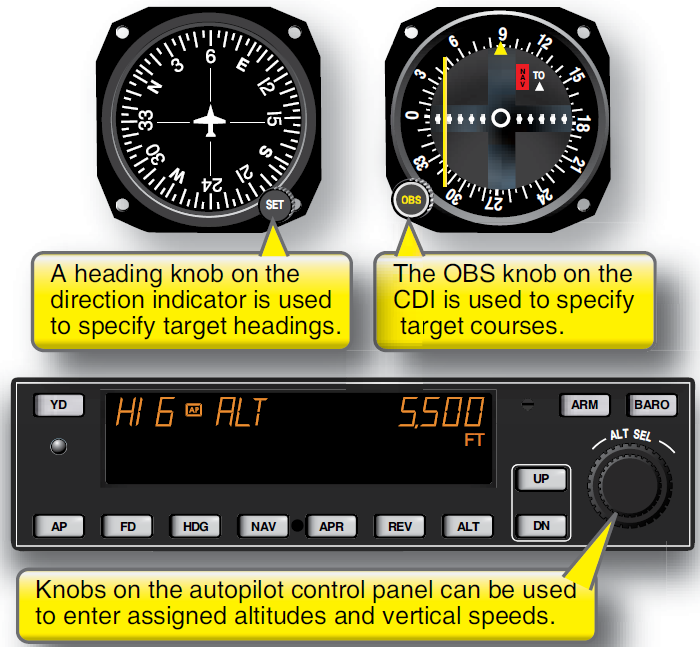
Figure 2. Simple autopilot with flight displays. Source: FAA Avionics handbook.
and then describe how Airbus and Boeing FMS controlled autopilots would work (Figure 3).
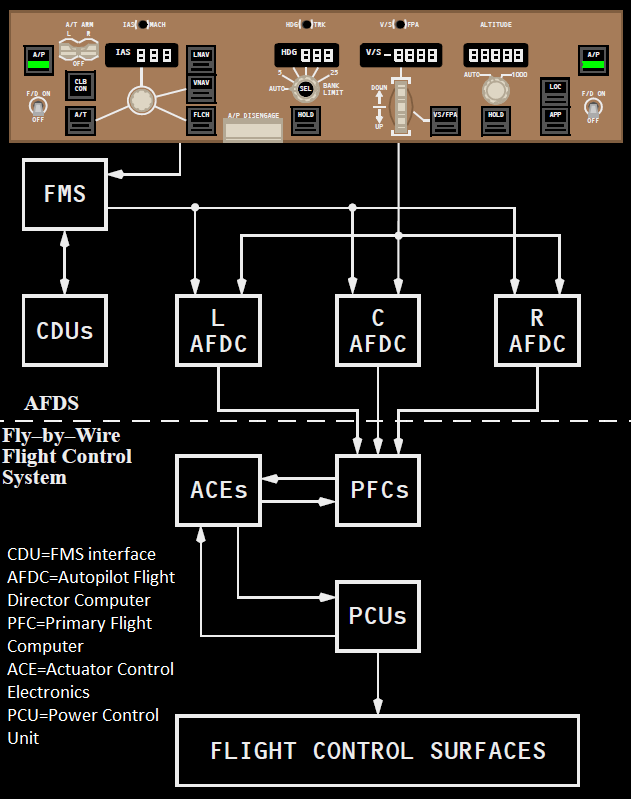
Figure 3. Boeing 777 autopilot. Source: Smartcockpit.com. Click for better view.
Climb after take-off
- After take-off we select climb vertical speed hold (VS) on a simple autopilot while following a heading in HDG mode. On an advanced autopilot, we would have selected SRS/VNAV and NAV/LNAV mode before start for an FMS controlled autopilot. SRS/VNAV is Airbus’/Boeing’s names for vertical navigation based on the programmed climb profile in the FMS (Airbus changes from Speed Reference System, SRS, to CLB for Climb mode once past acceleration altitude at ca 5000ft) and NAV/LNAV mode is the lateral navigation based on the FMS route.
- Simple autopilots hold a set climb speed and the aircraft speed and thrust must be managed by the pilot. Advanced autopilots can hold speed, climb speed or climb angle and they manage pitch and throttle to achieve these targets. They can also follow a climb profile in the FMS with intermediate altitudes and speed changes.
Cruise:
- Before we reach cruise altitude, we have dialed in the altitude we want to cruise at in the simple autopilot. It automatically captures the correct altitude and maintains it. The pilot must manage the throttles for correct speed. The FMS controlled autopilots captures the cruise altitude based on data in the FMS and automatically manages the throttles to speed up to the programmed optimal Mach number.
- An FMS controlled autopilot will automatically follow the pre-programmed course and altitudes in the FMS. A simpler autopilot requires the pilot to tune and set the radio navigations aids. The autopilot then follows the centreline of e.g. a VOR track in NAV mode. The FMS automatically does all the tuning of Navigation aids to establish the route tracks that the aircraft shall follow.
- Any cruise altitude change must be set manually with vertical speed and final altitude set in a simple autopilot. The FMS will calculate the most fuel optimal cruise altitude and control the autopilot to do the required step climbs to achieve these altitudes.
Descent:
- Optimal descent point must be decided by the pilot in the simpler case. He then orders VS (Vertical Speed mode) and sets the vertical speed at e.g. -500ft/min. The FMS calculates the optimal descent point and commands the aircraft in descent with optimal descent speed (for an Airbus aircraft one shall program the next altitude and press ALT at the descent point, the autopilot then changes to DEScent mode). The FMS based navigation can also handle intermediate altitudes and speed constraints.
Landing:
- For an ILS landing, the pilot manoeuvres the aircraft by HDG and VS to the right position to capture the ILS beam on the simple autopilot. Then he presses APR (Approach) on the autopilot when the ILS needles start to move. The autopilot then flies the ILS approach to just before the runway where the pilot takes over.
- For the FMS controlled autopilots, the FMS commands the autopilot in DES/VNAV and NAV/LNAV modes to the ILS capture where the pilot will press LOC followed by APP when established on the ILS localiser (the ILS lateral beam). Depending on ILS class, the autopilot can then follow the ILS all the way until touchdown and roll out (IIIb which I experienced with the A350-900 flight).
- For different RNAV and RNP approaches (GPS based landing procedures with different navigational precision), the support in the autopilots differs. The most recent and advanced (like the A350 autopilot I flew) turn an RNAV or RNP approach into the same procedure and settings as an ILS landing, thereby minimizing any additional training needed for the pilot.
Flight Director
A flight director (FD) is an additional computerized pilot aid that calculates the pitch, roll and yaw angles that are needed to fly a certain path or procedure. For example, after take-off the FD shows the pitch angle to hit the optimal climb speed and the heading to hit the set track. The FD does that with a cross hair in the primary flight display or through a V shaped bug to follow. During cruise and approach the FD shows how to pitch and roll the aircraft to follow the set paths. For landing, it shows the roll and pitch angels needed to gradually capture the ILS beams.
If an aircraft has a flight director system, the FMS uses the FD to control the aircraft either by having the pilot or the autopilot giving the pitch and roll commands to follow the FD and thereby the FMS’ instructions.
Hey Mr. Björn,
I saw a news today :
“Boeing and the FAA are concerned that a pilot might command a dive that exceeds the structural limits of the 787, as a response to erroneous information from the air data system.”
https://www.flightglobal.com/news/articles/boeing-faa-warn-787-pilots-of-bad-airspeed-data-423735/
I ask Mr. : if the 787 had a fly by wire system like airbus, would be impossible a command that exceeds the limits of the aircraft?
tank you.
Hi Carlos,
I would think so, it is about a fault in the basic data that goes into the calculation of the flight laws, don’t think Airbus hard limits protect you from that but I’m not sure. It most probably has to do with how the fault is entering the flight law calculation.
Carlos:
This looks to be the same as AF447, Pitots freeze up, the automation system hands the aircraft over to the pilot in a one step down degraded control law mode (alternate or Boeing equivalent)
What A pilot should do and the instructions are being re-iterated is maintain your flight configuration (ie. don’t do anything) as it makes no sense that you have suddenly gone into a stall (no speed).
I have seen this called a startle reaction.
the other negative reaction is to pull back on though that makes no sense to a properly trained pilot.
Aircraft have redundant instruments for just that purpose, you do cross checks on the suspect one, confirm its bogus and fly the aircraft on the ones that agree (artificial horizon being a quick one in this case, but also your vertical speed indicator (VSI) , altimeter (all of which are on the FMS (old school it was the Artificial Horizon, now it display all sorts of extras) but you also have another set of totally independent VSI, altimeter that you can (and should) cross check to.
Its called an instrument scan and for good reason.
Its amazing that after the publicity and training resulting from AF447, there are still totally wrong actions.
The FAA is anything if it makes no sense (no speed) then don’t do anything, you have a pitot issue (which should be obvious). there is also a procedure for maintaining safe aircraft attitude if the pitot loss is extended.
Not something that gives me a warm fuzzy in regards to pilot skill and they still do not get it. Some may think me harsh but that’s the sort of piloting that should get washed out of the system.
After all these incidents (not just the losses but the close calls that don’t hit headlines ) you have to wonder how many poor or bad pilots are out there?
Bjorn:
How do they handle the auto altitude change based on the most efficient altitude calculated in the advanced auto pilots when ATC has to be notified and agree to an altitude change?
I haven’t flown it myselves but assume it comes as a suggestion from the FMS that you can accept after you have got clearance to change Flight Level.