Leeham News and Analysis
There's more to real news than a news release.



Bjorn’s Corner: Sustainable Air Transport. Part 29. Lift + Cruise VTOLs.

By Bjorn Fehrm
July 22, 2022, ©. Leeham News: We analyzed vectored thrust VTOLs last week, like Joby Aviation’s Joby S4. Now we look at VTOLs that separate vertical and forward flight thrust generation into two different systems. Typical exponents are Wisk Aero Cora, Beta Technologies Alia-250, and Embraer’s EVE.

Figure 1. Wisk Aero Cora. Source: Wisk Aero.
Vertical and Forward thrust VTOLs
When we looked at Vectored Thrust VTOLs last week, we saw that the thrust requirements between vertical takeoff/landing and forward flight were very different.
If the forward flight part is well done (a good main wing and control concept), the difference between vertical and forward flight thrust is the Lift over Drag value of the VTOL, typically around 15 when the forward flight is at optimal cruise speed.
The 15 times difference necessitates variable pitch rotors for all motor/rotor units, and it means the motors and rotors work at 7% of full thrust when in cruise. It’s difficult to design efficient motor/rotors that span a 7% to 100% thrust range.
The Lift + Cruise principle
The Lift + Cruise VTOL principle separates the vertical lift thrust generation from the forward flight thrust generation. It increases the number of rotors, motors, and inverters necessary to make a complete propulsion system, but it simplifies the design of these parts. It also simplifies the tricky transition from vertical to forward flight.
Let’s go through the three leading projects and look at how they solved the problems for the two flight phases;
Vertical flight
All three use vertical thrust systems with fixed pitch rotors as the vertical speed range is narrow. The rotor disc area is not compromised by the conflict between vertical and forward air mass flow and overspeed requirements; the vertical part can be designed to have a low disc loading.
How the vertical thrust is divided over rotors differs. One extreme is Wisk Cora with 12 smaller rotors, Figure 1. Beta Technologies Alia-250 is at the other extreme, with four large rotors, Figure 2.

Figure 2. The Beta Technologies Alia-250 with four lift rotors. Source: Beta Technologies.
The Embraer EVE lies in-between with an eight-rotor lift concept, Figure 3.

Figure 3. Embraer’s EVE with eight lift rotors. Note the changed wing configuration. Source: Embraer.
The numbers of rotors are dependent on the redundancy concept the VTOL is using. The vehicle must sustain vertical flight with different parts of its lift system failing. For Wisk and EVE, this is a rotor/motor/inverter combination not working.
Beta, with only four rotors, is probably designed with the mechanical rotor as a failsafe unit, whereas the motor, inverter, and battery system have built-in redundancies. It might also employ a forward flight landing ultimate redundancy, as it’s hard to control a VTOL with only three rotors.
The rotors of Wisk and Beta look funny because these put the motors and probably also inverters in the rotor hubs. The rotating shaft is then fixed to the rotor beams. As parts of the motor + inverter are spinning with the rotor, it gets efficient air cooling, saving liquid cooling for the lift system motors and inverters. EVE seems to opt for liquid cooling of motor and inverters as these are built into the beams and drive the rotors in a conventional way.
All three park the lift rotors for minimal drag when transitioned to forward flight. The drag of the parked rotors will be highly dependent on the angle of attack of the aircraft. We can expect these rotors to be angeled for a minimum of rotor blade edge vortices at the optimal cruise speed angle of attack.
Forward flight
All designs use pusher propellers for forward flight. This eliminates the propwash scrubbing drag and wing lift distribution influence for the VTOL.
The forward speed propellers could be fixed for these projects as they can be optimized for a narrower speed range. As the propellers are smaller than the lift rotors for all designs and a variable pitch design is not too hard to justify for a single propeller, Wisk and Beta use variable pitch forward flight propellers. The speed range with a good motor/propeller efficiency is thus enlarged.
EVE changed its design from a canard to a conventional main wing and tail design at this week’s Farnborough Airshow. The design keeps the twin forward flight ducted pusher propellers fitted at the end of the inner lift thrust beams. It’s not clear if EVE employs variable pitch propellers, but the separation of lift and cruise power would allow a simpler and lighter fixed design.
Project approach
The three employ very different project approaches:
Wisk has built two-seat test VTOLs that have flown extensively in remotely piloted vertical, forward and transitional flights over the last year. The company, formed by Boeing and the Kitty Hawk owner Larry Page in 2018, has decided that the business model with a pilot flying four passengers (the production model has four seats) is not attractive.
Instead, the partners go to autonomous flights directly. It’s a large jump, but if successful, it will render piloted VTOL projects operationally expensive, as the Pilot pay is a major operational cost block together with battery costs. Additionally, the reduction of the carried payload by 20% helps with the mass carried.
The autonomous knowledge can be Boeing’s motivation for its substantial Wisk involvement. Autonomous flight has several applications in Boeing’s civil and military businesses.
Beta technologies has built a full-size prototype that it flies extensively in forward flight, Figure 4.

Figure 4. The Beta Technologies Alia-250 during forward flight testing. Source: Beta Technologies.
In May, it made a multihop 1,400 miles flight from Plattsburgh Airport, New York, to Bentonville, Arkansas. So the forward flight mode is well developed and tested. It has yet to install vertical flight motors and rotors, however. The vertical flight modes with the tricky transitional phase remain to develop.
EVE has extensive experience with forward flight vehicles using propellers (Ipanema, Bandeirante, Brasilia, and Tucano are all Embraer propeller aircraft); it, therefore, focused on validating the EVE vertical flight concept with an eight-rotor iron bird, Figure 5.
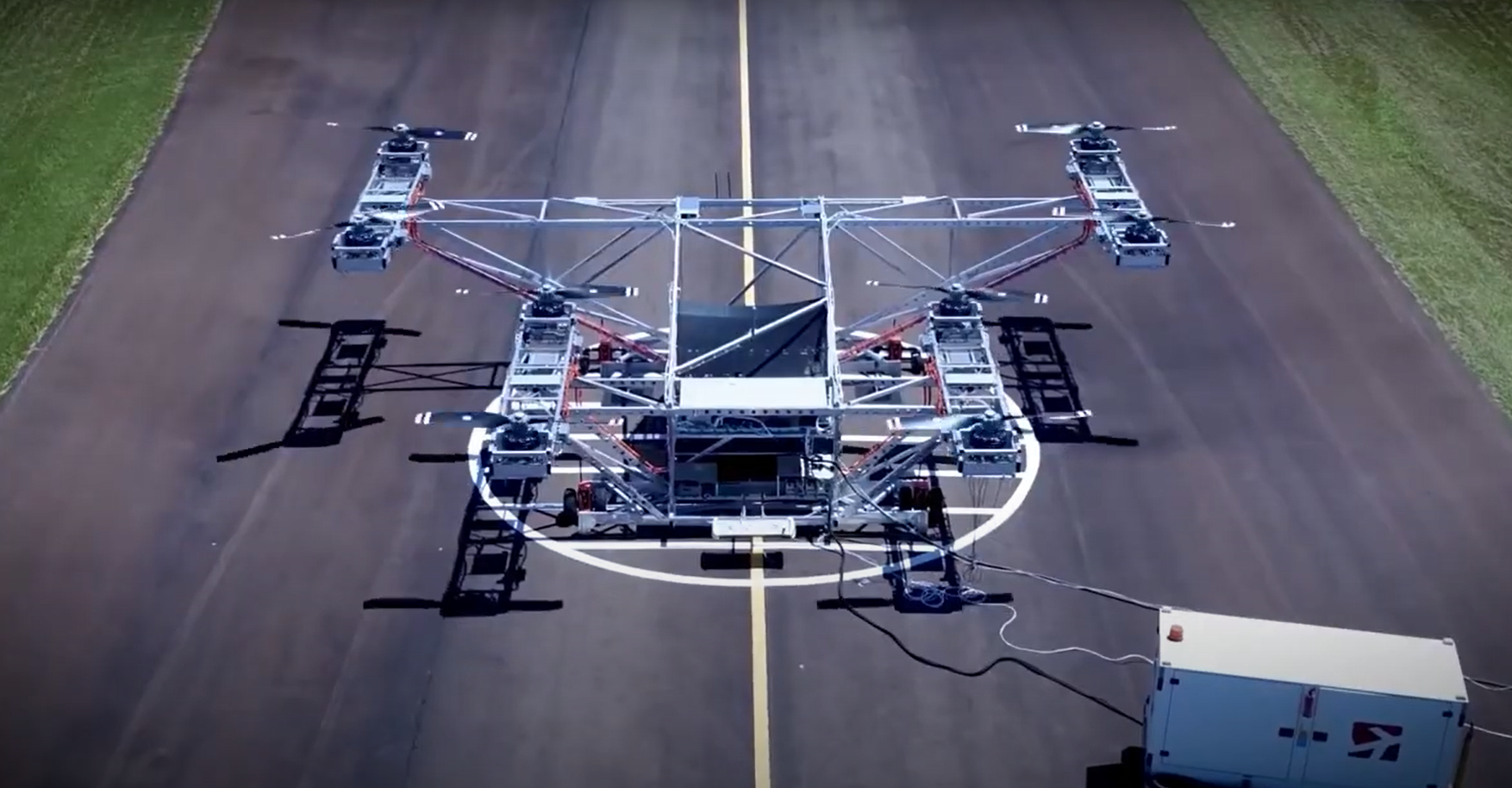
Figure 5. EVE lift concept testing. Source: Embraer.
With this experience, it could go directly to a full-size certifiable prototype, combining vertical and forward flight. EVE is several years behind Wisk and Beta with its prototype, but in our view, it’s not the first to prototype flight that is important; it’s when a certified VTOL is operationally efficient that counts.
Embraer is the only of the three that has certified multiple aircraft designs. It’s also the only organization besides Airbus (with its CityAirbus NG, which we come to later) with a worldwide support and service organization to keep the VTOLs flying 24/7. It’s a major advantage, as a support and service organization takes time to build.
Lift + Cruise VTOLs seem the more feasible designs, but bigger, very expensive, noisy, demanding.
Realities seem to be leaking through with regards to energy storage, capacity, (not) foreseeable battery improvements and practicality.
W’ll probably see “innovative” range-extenders, integrated batteries chargers added to the designs (micro APU’s using fuel) to make everything workable.
A move to hybrid, not because fossil it’s loved, but because just batteries isn’t really feasible.
In my opinion lifting, moving 400kg payload quickly safely through the air at height, fast, even just 70nm, rain and headwind, requires energy batteries can’t provide.
And w’ll probably see the VTOL customers not hindered by ROI come in, that can afford paying 4-6 mln a ship, order 150 and set up infrastructure, support development, organize regulations and pay upfront from their huge budgets, the military.
Many of the innovators with their disrupting designs hope to be taken over by one of the large Defen$e contractors before program finances get ugly..
I’m struggling to understand Beta’s choice of a four-rotor configuration in hover.
The article says that “it’s hard to control a VTOL with only three rotors.” My question is, is it at all possible to control a four-rotor, fixed-pitched prop VTOL, when one rotor/motor is gone?
I understand that the article says that each of the Beta’s rotors will probably be driven by more than one motor (on the same shaft, presumably), which makes sense, IF the manufacturer can demonstrate that the failure of one motor won’t/can’t put the other out of action.
Otherwise, my understanding of four-rotor, fixed-pitch systems is that if you lose a rotor WHILE HOVERING, you’re already in a crash. A ballistic chute would be nice, but comes with a substantial weight penalty.
-I suspect on aspect of the choice of only 4 rotors is that Beta, rather uniquely, is not targeting “air taxi” service but freight. This might ease certification. It’s initial funding came from a company looking for a cost effective way of transporting human organs for transplant, then UPS and even the USAF is interested.
-Another is that the aircraft can take off, fly and land without its lift rotors on an ordinary runway.
-A quadcopter with loss of a single rotor can be controlled in pitch and roll to keep it level but it will spin around the yaw axis. My intuition is that the vehicle can be “deyawed” using the 5th rotor, the pusher propellor, and the resulting unwanted forward or backward motion nulled out by pitching the aircraft. Not sure without a few hours of writing out matrices. 😕
-There may be a ballistics parachute and as Bjorn suggested a redundant motoron each shaft. An interesting aircraft.
Is not Boeing aka Wisk a world wide company with all the support (pun on the rotors) needed?
Granted autonomous flying is not going to be a civilian application so this would be military of some type.
Agree, but only if Wisk declares that Boeing Global Services is their support provider. No statements to this effect so far.
Working to twist my mind around that but it makes sense that Wisk is really a military application.
BGS then would not play into that.
Granted I continue to struggle with all the air taxi stuff. To co-op a phrase, a concept in search of an application.
Maybe to add to that would be a long term single pilot application and or no pilot (30 years?) but all way down the road if at all.
I continue to be stunned at how much is being invested in something that has no current use and dubious future at best
We all know how to make a small fortune in aviation.
I think folks are too skeptical on eVTOL. Batteries do have a way forward. Amprius is already shipping cells with an energy density of 450 Watt Hours per kg: https://amprius.com/# which is over twice that used in current eVehicles and electric aircraft. Some of Amprius blog articles on UAS are very interesting. Batteries in the long term are not going to be a problem for regular high frequency flights of under 150nmi when such batteries become regular batteries.
Helicopters have provided amazing breakthroughs in some areas but on the economic front are a dead end failure. They cost too much. Courier companies can not afford to use them.
Off topic: I love this YouTube video of the Jetson One maned quadcopter. It has a rapid deployment ballistics parachute, a collision avoidance system, endurance of 20 minutes with a 95 kg pilot. Only eVTOL could have produced such an amazing flying machine.
https://m.youtube.com/watch?v=NSCvsW-z2LE&t=1s
https://m.youtube.com/watch?v=dcDwu_EdJCo
I seem to have given a bad link
https://amprius.com/