Leeham News and Analysis
There's more to real news than a news release.
Bjorn’s Corner: Fly by steel or electrical wire, Part 3

By Bjorn Fehrm
August 9, 2019, ©. Leeham News: In our series about classical flight controls (“fly by steel wire”) and Fly-By-Wire (FBW or “fly by electrical wire”), we this week turn to the actual Flight control system after covering the infrastructure needs last week. We could see the FBW required a higher redundancy Hydraulic and Electrical infrastructure. Why we will come to.
Now we look at the control principles for classical control systems like the Boeing 737 system and FBW system like the Airbus A320 system.
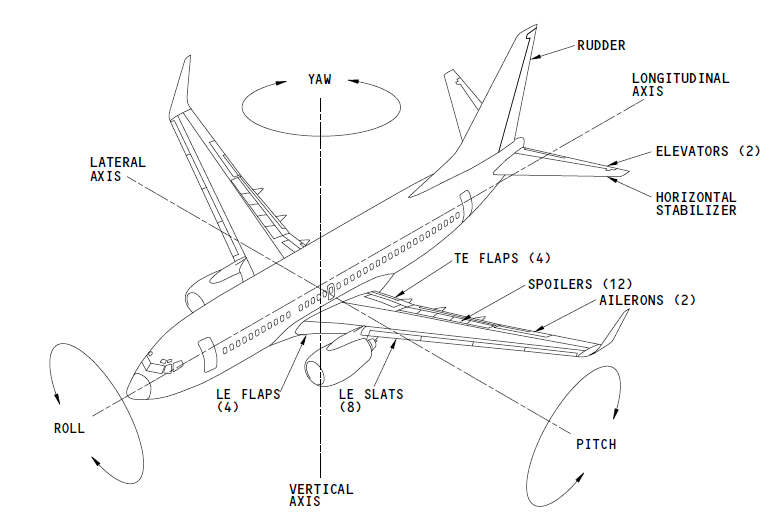
Figure 1. The control axis and control surfaces of a 737. Source: Boeing.
The Steel wire control systems versus the Electric wire alternative
The headline is a bit of wordplay but it also describes the reality. The Classical system we look at, the 737 system, indeed uses steel wires to transmit commands to control surfaces, Figure 2. The Control column commands are displacing the aircraft elevator via wires, pulleys, and cranks through a hydraulic booster system, the elevator PCU in the Figure (PCU for Power Control Unit), but the command is not modified by any part of the system.

Figure 2. A principal diagram of the 737 pitch control system. Source: Boeing.
The Autopilot has actuators which can command in parallel and there is a Mach trim actuator which shifts the force feedback neutral point of the system, but there is no gain change or change of the displacement of the elevator based on the pitch reaction of the aircraft. The Pilot is the feedback loop component. If the aircraft pitches up faster than he intended, he reduces the pitch up pressure on the Yoke and the aircraft reduces the pitch up rate.
There is also a variant of FBW systems which functions like the 737 system. It merely replaces the steel wires with electric wires. It’s the Open-loop FBW system.
The E-Jet E1 pitch channel is such a system whereas the E2 generation changes this to a more advanced feedback system. In the open-loop FBW, the displacement of the control column is transferred into an equivalent movement of the aircraft’s elevator, like for the 737. Unlike the 737 there is a variable control gain unit in the loop which lowers loop gain at higher speed, but there is no adjustment of the elevator displacement based on how the aircraft reacts in pitch. There is no system feedback loop. The Pilot is the feedback loop like for the 737 system.
A Feedback FBW like for the E-Jet E2 and A320, 330/340, 350, 380, 220 or Boeing 777/787 is different, Figure 3.
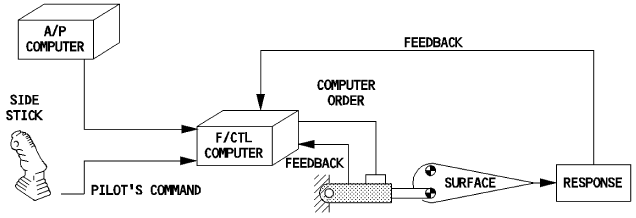
Figure 3. Feedback based FBW system. Source: Airbus.
Here the pilot commands how he wants the aircraft to fly, for example, pitch up at a certain rate or G. The FBW Flight Control computer calculates an elevator displacement which shall make the aircraft pitch up according to the pilot’s command.
Accelerometers and gyros in the Response unit (often called AHRS, Attitude and Heading Reference system or ADIRU, Air Data and Inertial Reference Unit) tell the FBW computer about the aircraft’s response. If it differs from what the Pilot wanted the FBW computer modifies the command to the elevator. The pitch control loop is closed around the FBW computer.
The flying of the two types of systems, Open-loop steel or electric wire and Feedback FBW is a bit different. In the first, the Pilot is controlling the aircraft to the full. If there is a gust before landing which changes the pitch angle, he shall counter it. In a feedback FBW, the aircraft counters the gust. The Pilot hasn’t asked for any change in pitch so there shouldn’t be any. For the FBW computer to fix.
In practice, there isn’t a big difference in how the aircraft feel for the Pilot. I have flown the classical systems and two different feedback FBW, the A350 and A220. It wasn’t a difficult transition, it felt natural right away. How and why we will discuss in coming Corners.
The Japanese Mitsubishi A6M “zero” naval fighter had a crude adaptive gain in aileron deflection or gearing. When the undercarriage was extended mechanical changes deflected the pilots joystick movements into proportionally greater amounts.
It’s a little surprising that when irreversible hydraulic controls were introduced with artificial feel based on dynamic pressure (indicated air speed) and deflection that someone didn’t try a mechanical computer to adapt gain instead of computing force feedback. The mechanical computing of the day was extremely accurate and reliable. Numbers were represented as shaft turns, addition and subtraction performed by differentials and multiplication and division by conversion to logs with cams, followed by addition then and antilog cams. Aircraft often had bob weights to limit provide additional force feedback and limit pitch rate and aggressive pull-up manoeuvres.
William – This is US Navy instructional film on how mechanical fire control computers work is outstanding. I never knew how much you get done that way.
https://www.youtube.com/watch?v=s1i-dnAH9Y4
That stuff was amazing, built purely on math and machined down to amazing tolerance for the time.
Finding a problem had to be hair tearing.
Hit probability was low, missiles much better but a lot more costly, ergo , Artillery still has a major place on land but not at sea where things move too far and fast.
The cams were cast into approximate profiles or a cam duplication matching was used to cut copies. If super accuracy was required, as they would for a Battleships computers (range keeper as the USN called them or Tables the Royal Navy) they were “ground” I think by using a grinding paste similar to the way lenses were made and then repeated measurement. The inertial guidance system of the Atlas Missile used mechanical computing as it was more accurate. The Flight Control Systems remained doggedly steel cable despite various electronic computing mechanisms trimmming in all sorts of corrections.
Thanks, I enjoyed that YouTube. Computing and servo has been a big part of aircraft control rigging since jet aircraft forced control solutions to problems such as yaw dampers to deal with high speed snaking, mach trim etc. The general public, who are often somewhat paranoid about computerised flight control systems don’t realise that the steel wire systems have essentially been hybrid computerised for 60 years. The German V2 missile used an electronic computer connected to gyroscopes to control fins and vanes in the exhaust to control the missile. It was the only way they could handle the massive changes in stability as the missile went from stationary, subsonic, transonic, supersonic with C of G changes, pressure changes, tank slosh in a vibration resistant mechanism. Designers of Concord and SR71 faced similar problems. Concord went fly by wire and although SR71 was not fly by wire it had a stability augmentation system or S.A.S. that was essentially a yaw, pitch and roll damper engaged at all times with computing to decouple eleven and rudder and variable deflection. The Bristol Britannia had a mechanism to decouple the rolling motion produced by the rudder by trimming in aileron counter roll.
I have a question: in a modern jet airliner, if an engine fails at a critical phase such as just after rotation or take-off, how is engine failure detected and how is the rudder automatically driven to the side of the failed engine to stop loss of control. I’ve heard of Beechcraft detecting engine fault with PT6 automatically feathering and rudder automatically driving over. How is the fault detected, are their loadcells measuring engine thrust or propeller torque? I imagine the autopilot inputs for the rudder are used if there is no FBW system.
Dont forget the Pilots Circular Slide rule, its an analog computer too.
https://en.wikipedia.org/wiki/E6B
Yep, been there, done that and I still have mine
Off topic but reports of a Norwegian 787 has shed an engine over Rome
https://www.euronews.com/2019/08/11/fragments-of-norwegian-boeing-787-fall-near-fiumicino-airport-due-to-technical-failure
If true thats an RR engine.
appears to be turbine blades – no one hurt on ground or plane but some damage to car and roofs
RR is getting a bad name or a worse name
TransWorld, amusing that folks have been gathering engine parts from the street. I’m kinda jealous.
As an aside, your licence to call people out for off topic posts is revoked.
Ok, be that way. Quiet on the postings so I threw in current news.
I will see about jumping off the Space Needle to atone.
I hope I get a Gem award though
its not a GEM but a Lens ..
It could be intrersting to see the problem areas of both systems, I know of problems with Alfa Probes, Trimmable Horizontal Stabilizer Actuators, PCU’s, Elevator Feel Computers. Still those exist on both types with different actuation. FBW instead of wires & pulleys get away with greasing, keeping wires at the correct tension and the FBW is easier to have redundant wire bundles separated to the different actuators and you get Aviation Full Duplex databus redundancy. It could be interesting how Boeing solved the USAF Required redundancy on the 767-2C KC-46A with its mechanical flight Control system.
Very Good point on the 767.
At least from memory they have shifted and shuffled some different methods on the 767 and it would be illuminating to see what they did specifically and how it differs from the MAX and well as the variations within the 767 models.
A newer air frame but …………………………
767 Tanker wiring on initial production had to be redone/rewired to meet Mil spec EMP standards- Either the power point rangers didn’t bother to read the mil-specs-( those damm acronyms and two and three syllable words ) or came up with a “cost savings ” by avoiding rerouting and shielding issues- after all 767 had been in use for a few decades so why change. Supposedly has a MCAS type function but probably done correctly.
Think the KC-767 for Italy and Japan was a “non-USAF” spec Aircrafts and they now realise the difference to the KC-46A that is (maybe not 100.00% yet).
Since the USAF spec’s most likely includes some battle hardening/redundancy on both electrical wiring; flight control wires and hydrualic tubing there should some substantial duplications for all these systems on the KC-46A not found on the civilian 767 or KC-767’s.
The FAA knew about it since they certified the 767-2C that and then military converted into a KC-46A and could argue that the 737MAX needed some of the same treatment especilly since the SWA accident…
Things like EMP hardening-shielding and keeping a ‘ reasonable – greater ‘ distance between ‘ power’ cabling and ‘ sensor’- ‘control’ cabling
were ignored by the everett power poInt rangers- and newbie designers- who didn’t know a mil spec from a commercial spec. Adding to the confusion was the plan- requirement to certify the tanker to both FAA and Mil-spec requirements.
The result was to send renton electrical types who worked on Navy p-8 to everett for many weeks to correct that mess – only AFTER several planes had been pushed out to the flight line.
In (K)C-135’s inboard ailerons control loop, which is purely mechanical, unpowered, gain varies, depending on the flaps position, as far as I can understand it. Tu-154 has fly-by-rod control system with independent input from electronic control system via mechanical mixers, with all three angles and angle rates fed into the electronic system’s loop.